
















131
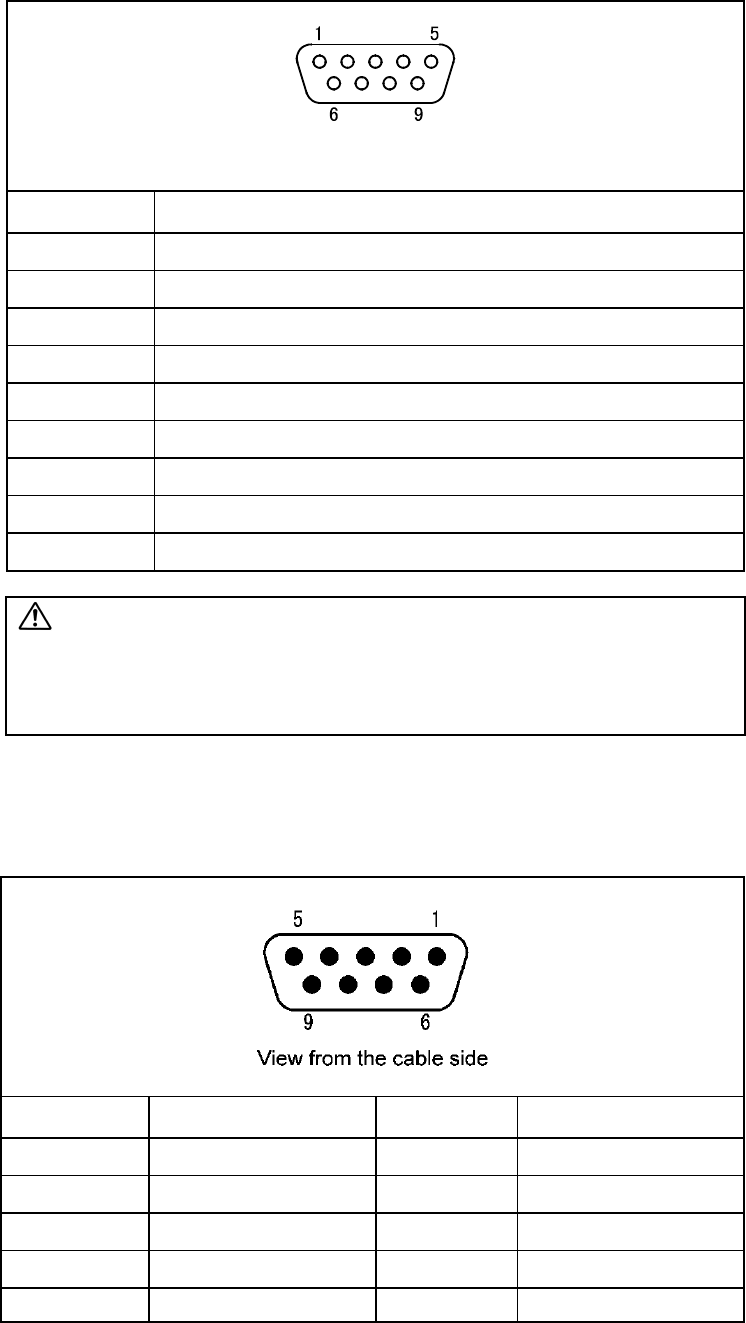
(2) I/O POWER CN7: Power connector for I/O (common to both modes)
CN7 Pin Assignment, common to both modes (PNP type)
View from the cable side
Terminal No. Name
1 Internal power source output +24V
2
Internal power source output +24V
3
Internal power source output 0V
4
Internal power source output 0V
5FG
6
Power input E0V
7
Power input E0V
8
Power input E24V
9 Power input E24V
Caution: When using the internal power source, keep the total
current capacity below 1.3 A. To use the internal power source of the
robot controller, connect the wiring so that the internal power source
will be separated from the external power source. Improper wiring may
damage the internal circuit.
(3) RS232C CN1: RS232C connector
CN1 Pin Assignment
Terminal No. Name Terminal No. Name
1
6DSR
2
RXD 7 RTS
3
TXD 8 CTS
4DTR 9
5SG