



















42
3.4.4 Instantaneous Stop (All Tasks) (Input)
(1) Function
Input this signal to instantaneously stop the running programs from an
external device. All tasks will stop.
(2) Terminal number
No.7 of connector CN8.
(3) Input conditions and operation
If the state of this signal is turned from ON (shorted) to OFF (open), the
robot will immediately stop in the middle of the ongoing step, and the
Robot-in-operation signal will be turned OFF. However, auto mode or
external mode will remain valid, and the suspended programs will be
resumed by inputting Program start signal.
For resuming the program after an instantaneous stop, see Chapter 5,
Subsection 5.3.2 "Program Operation Command (0001)".
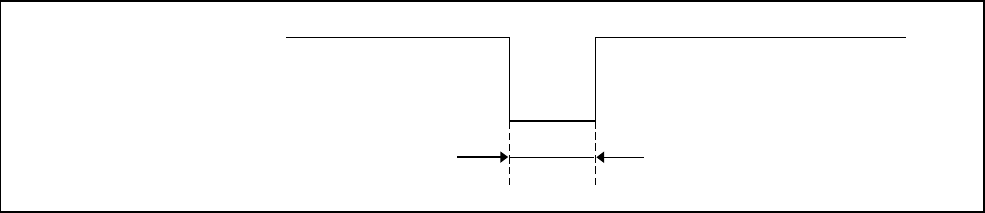
The minimum required pulse width is 50 milliseconds (msec.) or more.
Minimum Instantaneous Stop Pulse Width
ON (shorted)
Halt OFF (open)
50 ms. or more required