



















39
3.4 Usage of System Input Signals (Standard Mode)
The usage of each system input signal in standard mode is described below.
3.4.1 Enable Auto (Input)
(1) Function
The signal enables switching of the robot mode to auto mode (shorted
state).
The signal enables switching of the robot mode to manual mode or
teach check mode (open state).
(2) Terminal number
No. 4 of connector CN8.
(3) Usage
The signal is used for the AUTO/TEACHING selector switch of an external
operating panel and can be combined with a safety fence switch.
(4) Input conditions and operation
As shown below, the selectable operation mode depends on whether
this input is shorted or open.
If the input becomes open during automatic operation, the mode will be
switched to manual mode and ERROR21FC will be displayed.
If manual operation or a teach check is conducted with this input
shorted, ERROR21F2 will be displayed.
If the mode selector switch of the teach pendant or operating panel is
set to AUTO with this input open, ERROR21F3 will be displayed.
Since this state is shown as × in the table below, this error will remain
displayed until the robot exits this state.
Although ERROR21FD or ERROR21FC will be displayed when the
state is changed from
¡ to ∆ or ×, they will not be displayed when the
state is changed from ∆ or × to
¡.
When the input is turned OFF (open) in external mode, the external
mode output will also be turned OFF.
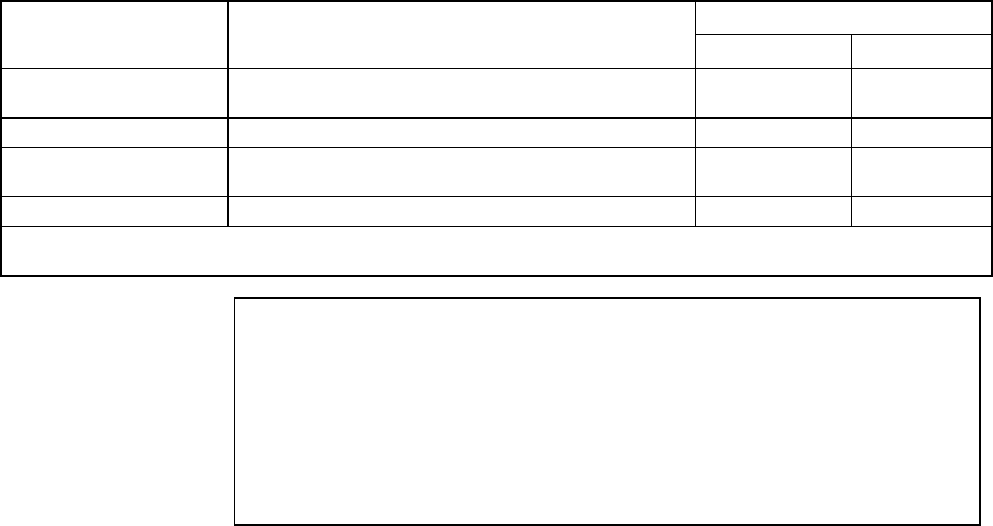
Relationship Between Enable Auto Input and Selectable Mode
Enable Auto
Operation mode Application
ON (shorted) OFF (open)
Manual mode
Manual operation with the operating panel or the teach
pendant.
∆ ¡
Teach check mode Program check with the teach pendant. ∆ ¡
Internal auto mode
Automatic operation with the operating panel or teach
pendant.
¡ ×
External auto mode Automatic operation with the external device. ¡ ×
Note: ¡ = Mode selectable × = Mode not selectable
∆ = Mode selectable but manual operation program not executable
Caution: In the pendantless state, auto mode is valid even if the Enable Auto
input is open. (The external mode cannot be switched and the
program cannot begin execution.)
Perform the following when operating the robot in the pendantless
state:
Q
QQ
Q
Set the robot so that it will not start to operate when the Enable
Auto input is open.
R
RR
R
Enable Auto input open state and auto mode output (See
Subsections 4.2.2 and 6.2.2 "Auto Mode".)
Set the equipment to make an emergency stop in an AND state.
Add
Q
QQ
Q
and
R
RR
R
with the external sequence circuit.