



















27
3.2 Usage of System Output Signals (Standard Mode)
The usage of each system output signal in standard mode is described below:
3.2.1 Robot Initialization Complete (Output)
(1) Function
The signal outputs to the external device that a MODE SWITCHING
COMMAND is ready to execute from the device.
(2) Terminal number
No.5 of connector CN10.
(3) Usage
The "mode switching command" will be executed as soon as this signal and
the auto mode signal are turned ON, after the power is turned ON.
(4) ON conditions
The signal will be turned ON when the system program for the Robot
Controller normally starts, after the power, is turned ON and the mode
switching command is ready to execute.
The signal will be turned ON when a robot failure is cleared by the
CANCEL key of the operating panel or teach pendant or by a CLEAR
ROBOT FAILURE command, after the power is turned OFF.
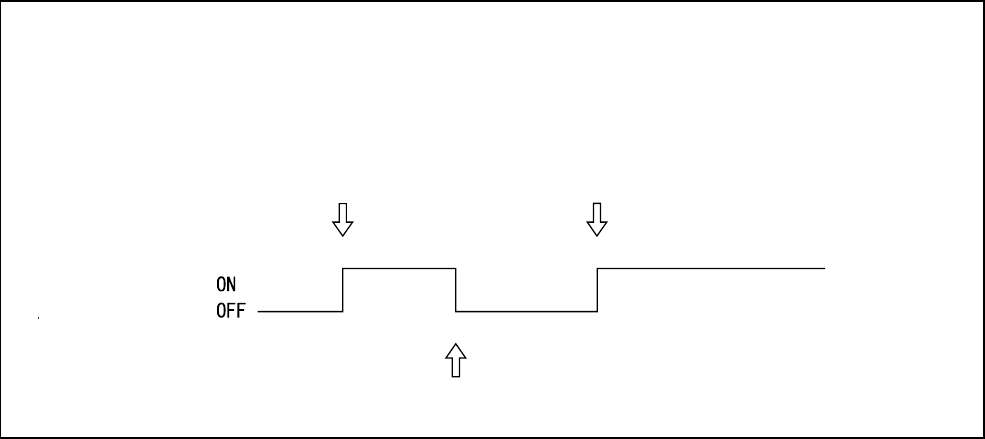
(5) OFF condition
The signal will be turned OFF when a robot failure or robot warning signal
is turned ON.
⋅
Robot error or robot warning
⋅ A robot error is cleared with the OK or CANCE
L
key of the operating panel or teach pendant.
⋅ A robot error is cleared with a CLEAR ROBO
T
FAILURE command from an external device.
ROBOT POWER ON
COMPLETE output
⋅ The system properly started t
o
operate after the power was
turned ON.
Robot Power ON Complete Output