



















28
3.2.2 Auto Mode (Output)
(1) Function
The signal outputs to the external device that the robot is in auto mode.
(2) Terminal number
No.6 of connector CN10.
(3) Usage
Starting the program from the external device requires an EXTERNAL
MODE SWITCHING BY MODE SWITCHING COMMAND input and a
PROGRAM START BY PROGRAM OPERATION COMMAND input. The
signal is used to monitor the auto mode output signal and determine
whether to execute the command.
(4) ON condition
The signal will be output when the robot enters auto mode by setting the
mode selector switch of the operating panel or teach pendant to AUTO.
(5) OFF conditions
The signal will be turned OFF under the following conditions.
The mode selector switch of the operating panel is set to MANUAL or the
teach pendant is set to MANUAL or TEACH CHECK.
The Enable Auto OFF is input..
(Note: The signal will not be turned OFF in the pendantless state
described in the OPTIONS MANUAL, Chapter 1, Subsection 1.3.3.)
Caution: The signal will not be turned OFF with INSTANTANEOUS STOP,
STEP STOP or CYCLE STOP commands.
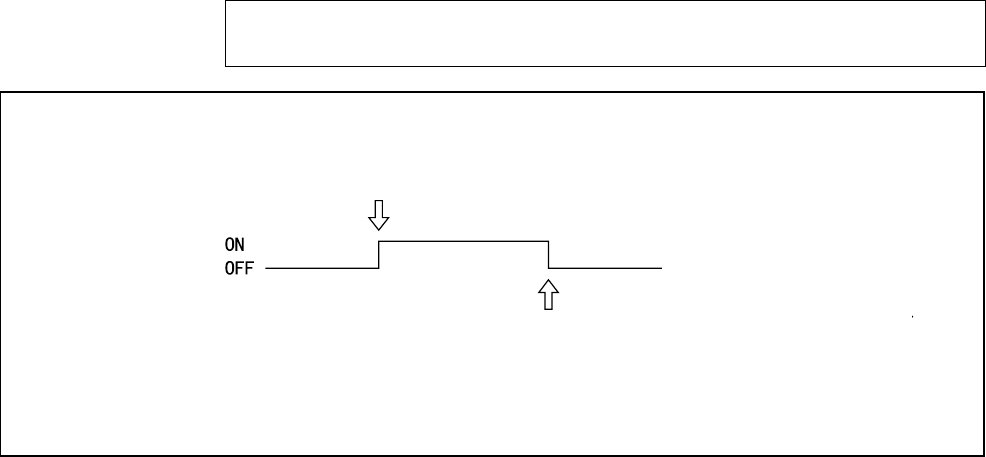
⋅ When the mode selector switch of the operating panel or teach
pendant is set to AUTO.
⋅ When the mode selector switch of the operating panel is set
to MANUAL or that of the teach pendant is set to MANUA
L
or TEACH CHECK.
⋅ When Enable Auto OFF is input
A
uto mode
output
Auto mode Output