



















45
3.5 Command Execution I/O Signals
Dedicated to Standard Mode
In standard mode the I/O commands can be executed using command execution I/O
signals. I/O commands execute the following.
⋅ Operate (start and stop) a program for each task.
⋅ Refer to or change variables from the external device.
⋅ Refer to or change inputs and outputs from the external device.
3.5.1 General Information about Commands
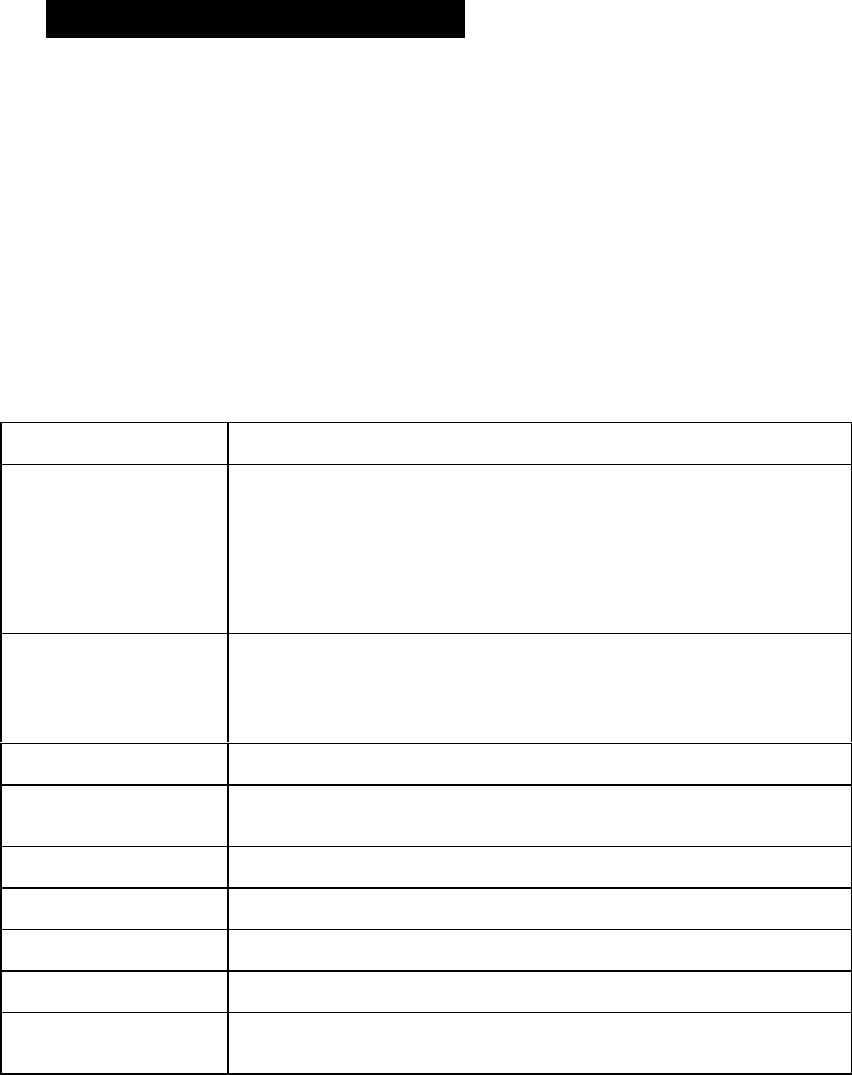
The table below shows the I/O commands functions.
I/O Command Functions
Command Description of function
Program operation
⋅ Starts the program cycle (specified program).
⋅ Step-stops the program (specified program/all programs).
⋅ Immediately stops the program (specified program/all
programs).
⋅ Resets the program (specified program/all programs).
Speed setting
⋅ Sets the external speed.
⋅ Sets the external acceleration.
⋅ Sets the external deceleration.
Error number read
⋅ Outputs the error number to the system I/O area.
Type I variable write
⋅ Reads a value from the system I/O area and substitutes it for a
Type I variable.
Type I variable read
⋅ Outputs a Type I variable to the system I/O area.
Mode switching
⋅ Switches the robot operation mode.
Clear robot failure
⋅ Clears a robot failure from the external device.
Internal I/O write
⋅ Sets the state of internal inputs and outputs.
Internal I/O read
⋅ Outputs the state of internal inputs and outputs to the system I/O
area.