



















AX3500 Motor Controller User’s Manual 121
Joystick Deadband Programming
noise is generated. Section “Electrical Noise Reduction Techniques” on page 37 provides a
few suggestions for reducing the amount of electrical noise generated in your robot.
Joystick Deadband Programming
In order to avoid undesired motor activity while the joysticks are centered, the AX3500
supports a programmable deadband feature. A small deadband is set in the controller by
default at the factory. This deadband can be stretched, reduced or eliminated using the
Roborun utility or by changing the “d” parameter using one of the three methods
described in the chapter “Configuring the Controller using the Switches” on page 175. The
AX3500 has 8 preset deadband values coded 0 to 7. The value 0 disables the deadband.
Other values select a deadband according to the table below. The deadband value applies
equally to both joysticks.
The deadband is measured as a percentage of total normal joystick travel. For example, a
16% deadband means that the first 16% of joystick motion in either direction will have no
effect on the motors. If the joystick is recalibrated to operate using a shorter travel (see
“Joystick Calibration” on page 122), the percent value in the table will not be as accurate.
Note that the deadband only affects the start position at which the joystick begins to take
effect. The motor will still reach 100% when the joystick is at its full position. An exagger-
ated illustration of the effect of the deadband on the joystick action is shown in the
Figure 82 below.
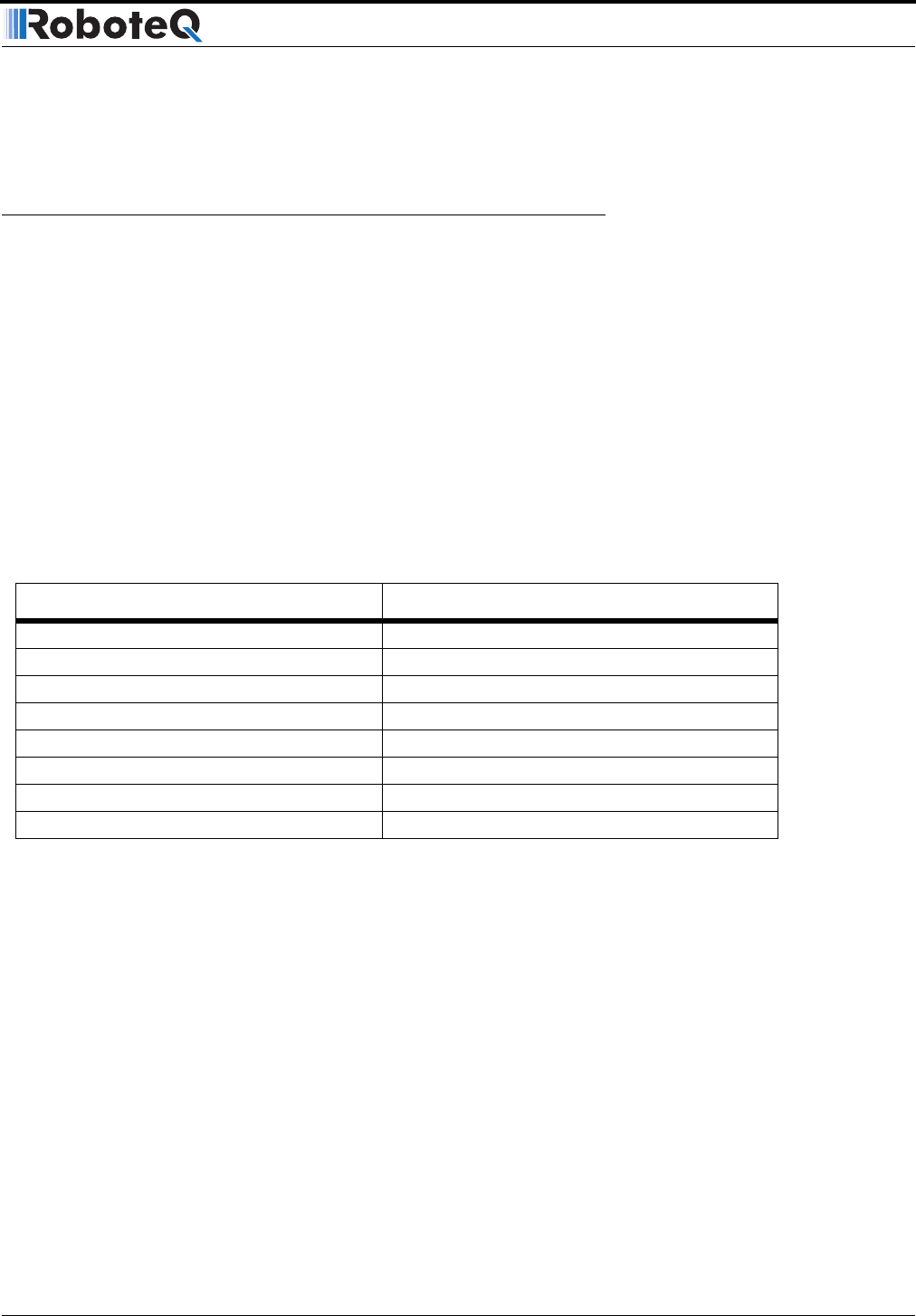
TABLE 20. Selectable deadband values
Deadband Parameter Value Deadband as Percent of full Joystick Travel
d = 0 No deadband
d = 1 8%
d = 2 16% - default value
d = 3 24%
d = 4 32%
d = 5 40%
d = 6 46%
d =7 54%