



















AX3500 Motor Controller User’s Manual 155
Reading & Changing Operating Parameters at Runtime
Gains values are integer number from 0 to 63. This number is divided by 8 internal so that
each increment equals 0.125.
Reading & Changing Operating Parameters at Runtime
It is possible to change several of the controller’s operating modes, on-the-fly during nor-
mal operation. Unlike the Configuration Parameters that are stored in Flash (see above),
the Operating Parameters are stored in RAM and can be changed indefinitely. After reset,
the Operating Parameters are loaded with the values stored in the Configuration Parameter
flash. They are then changed using RS232 commands.
Use the command following commands to Read/Change the Operating Modes
Syntax: ^mm Read Parameters at location mm
^mm DD Write Parameters DD in location DD
mm and DD are Hexadecimal values.
The table below lists the available parameters
Bit Definition See pages
7:0 8 bit value. Two registers used to form one 16 bit
number for each Joystick parameter.
Default values (in decimal):
Min = 4400
Center = 1600
Max = 3200
page 122
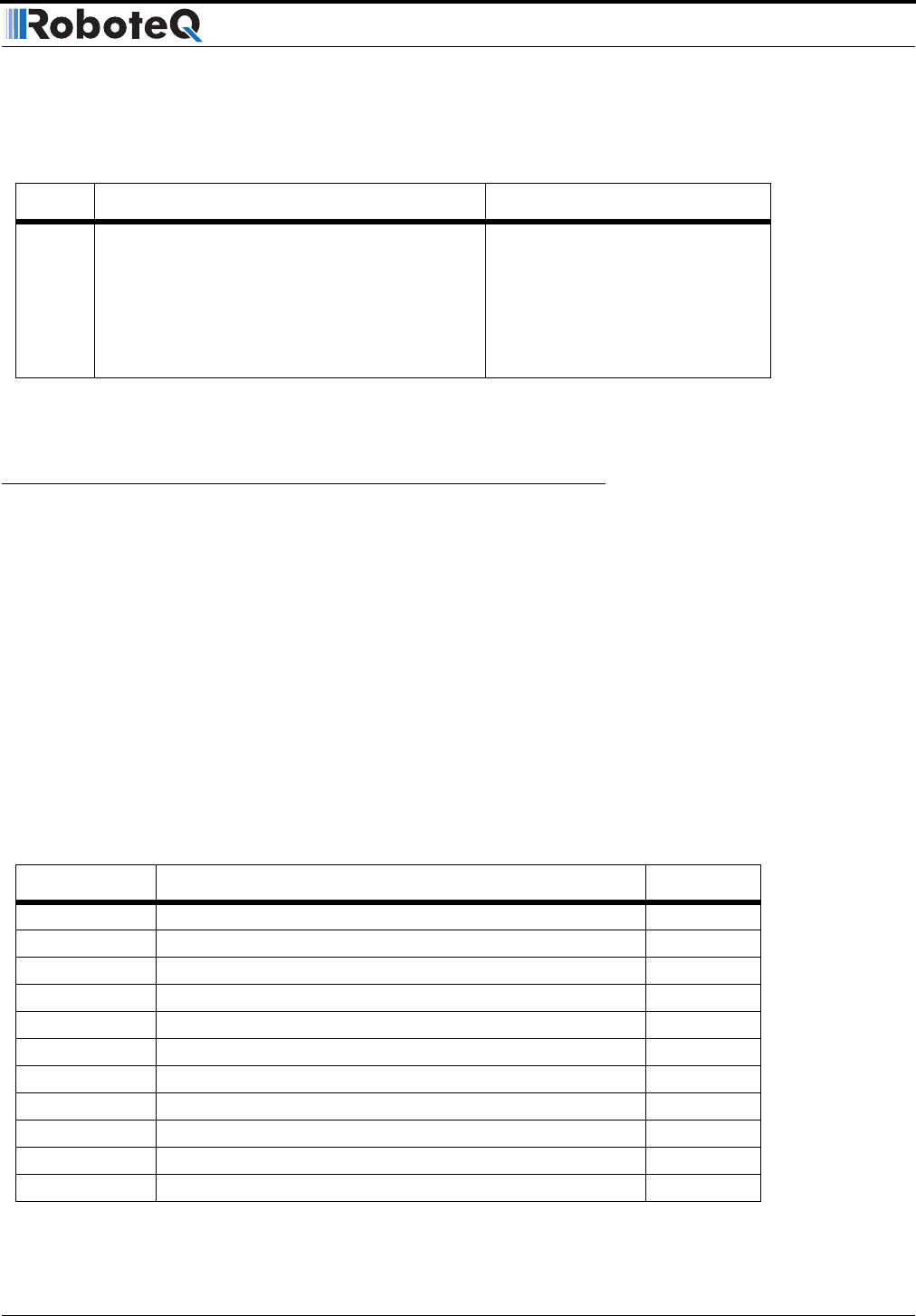
TABLE 26. Runtime R/W Parameters list
Location Function R/W
^80 Channel 1 Operating Modes R/W
^81 Channel 2 Operating Modes R/W
^82 PID Proportional gain 1 R/W
^83 PID Proportional gain 2 R/W
^84 PID Integral gain 1 R/W
^85 PID Integral gain 2 R/W
^86 PID Differential gain 1 R/W
^87 PID Differential gain 2 R/W
^88 PWM frequency R/W
^89 Controller Status R Only
^8A Controller Model R Only