



















AX3500 Motor Controller User’s Manual 195
Running the Motors
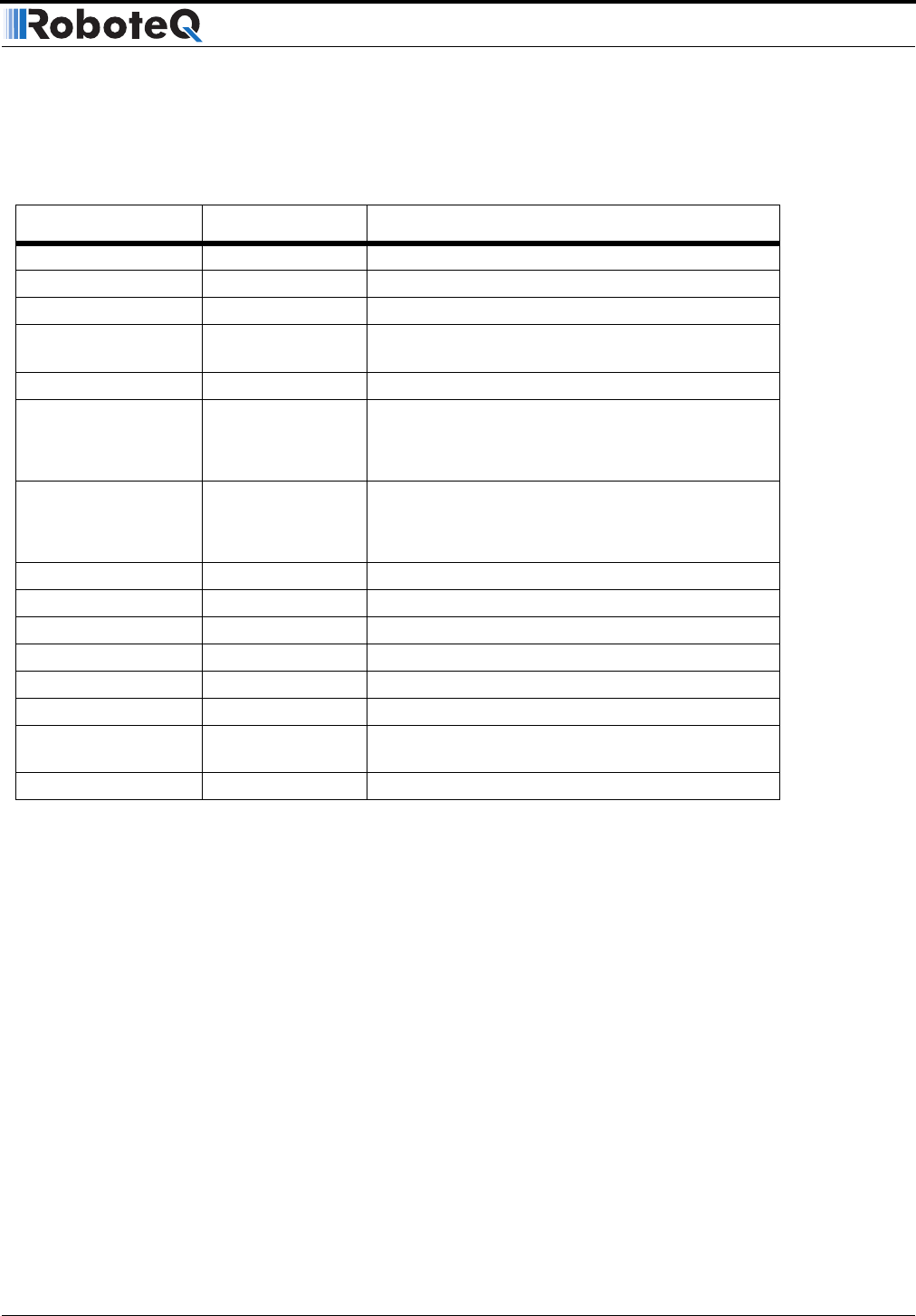
line of the save file contains the Header names. Each following line contains a complete
set of parameters. The Header name, order and parameter definition is shown in Table 37:
Connecting a Joystick
Exercising the motors can easily be done using a Joystick in addition to the on-screen slid-
ers. Simply connect a joystick to the PC and enable it by clicking in the Joystick check box
in the PC utility.
If the box is grayed out, the joystick is not properly installed in the PC. Click on the “Config
Joystick” button to open a configuration screen and the joystick control panel.
Joystick movement should automatically translate into Channel 1 and Channel 2 command
values and make the sliders move. These commands are also sent to the controller. In the
Config Joystick panel, the Joystick may be configured so that the X-Y channels are
swapped and the direction for each axis reversed.
It is strongly recommended that an USB rather than Analog joystick be used.
TABLE 37. Logged parameters order, type and definition
Parameter Header Data type/range Measured Parameter
Seconds Integer Timer value expressed in seconds
Command1 -127 to +127 Command applied to channel 1
Command2 -127 to +127 Command applied to channel 2
Power1 0 to 127 Amount of power applied to the output stage of chan-
nel 1
Power2 0 to 127 Same for channel 2
Ana 1, Speed 1, Pos 1
or Temp 1
or Volt 1
-127 to + 127
-40 to +150
0 to 55
Value of sensor connected on analog input 1. Data is
automatically converted to the right value and format
by Roborun according to the sensor that is being used.
Ana 2, Speed 2, Pos 2
Temp 2 or
Volt 2
-127 to + 127
-40 to +150
0 to 55
Same for channel 2
Amps1 0 to 255 Measured Amps on channel 1
Amps2 0 to 255 Measured Amps on channel 2
FET Temp1 -40 to +150 Measured Temperature on channel 1’s heatsink.
FET Temp2 -40 to +150 Measured Temperature on channel 2’s heatsink.
Batt Volt 0 to 55 Main Battery Voltage.
Ctrl Volt 0 to 28.5 Internal 12V Voltage.
Enc1 -127 to + 127 Measured Optical Encoder’s Speed or Position
depending on selected operating mode
Enc2 -127 to + 127 Same for channel 2