



















Using the Roborun Configuration Utility
188 AX3500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
These fields are enabled only if the R/C mode is selected. These number areas will let you
read and modify the R/C pulse timing information used by the controller. New values can
be entered manually to create different capture characteristics. They are also useful for
viewing the stored values after an automatic joystick calibration sequence. See “Joystick
Calibration” on page 122 and “Automatic Joystick Calibration” on page 123.
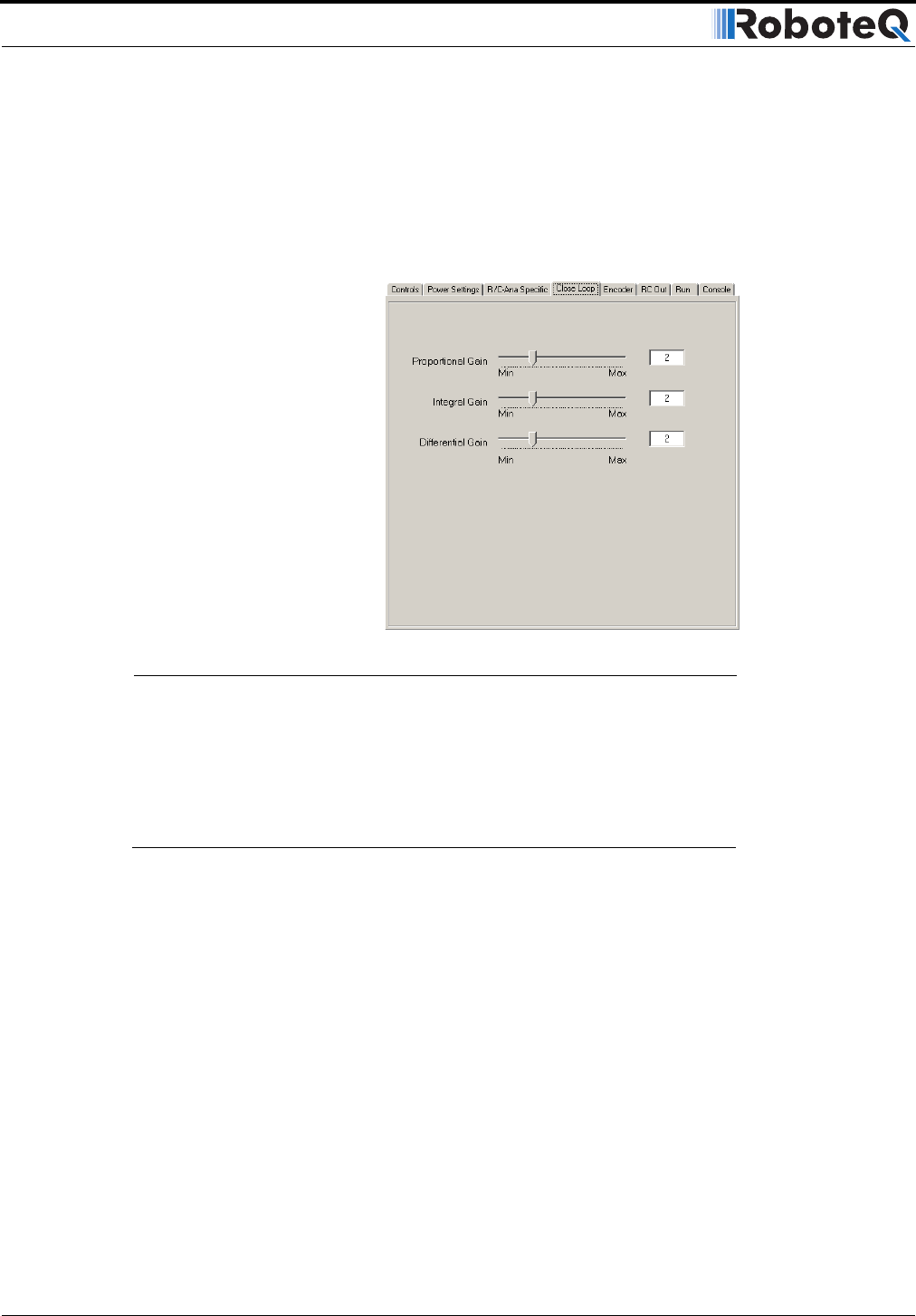
Closed Loop Parameters
The screen shown in Figure 106 is used to set the Proportional, Integral and Differential
gains needed for the PID algorithm. These PID gains are loaded after reset and apply to
both channels. Gains can be changed individually for each channels and on-the-fly using
RS232 commands. These parameters are used in the Position mode (see page 89) and the
Closed Loop speed mode (see page page 101).
Encoder Setting and Testing
Extensive diagnostic, calibration, setting and testing support is provided in the Roborun PC
utility. Basic instructions on how to install and run the PC utility can be found in “Using the
Roborun Configuration Utility” on page 181.
Once the utility is up and running and the controller found and identified, click on the
“Encoder” tab to bring up the Encoder configuration and setup screen show in Figure 107
below.
FIGURE 106. Closed Loop parameter setting screen