



















Connecting and Using the Encoder Function
86 AX3500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
reached. This movement is controlled by the PID position algorithm inside the controller
and is therefore best suited at tracking position.
Since the controller uses a signed 8-bit value (-127 to +127) for the distance measurement
in the Position Mode, a special algorithm is used to convert the real distance which can be
much higher than -127 to +127, as both the counter and destination registers are 32-bit
wide.
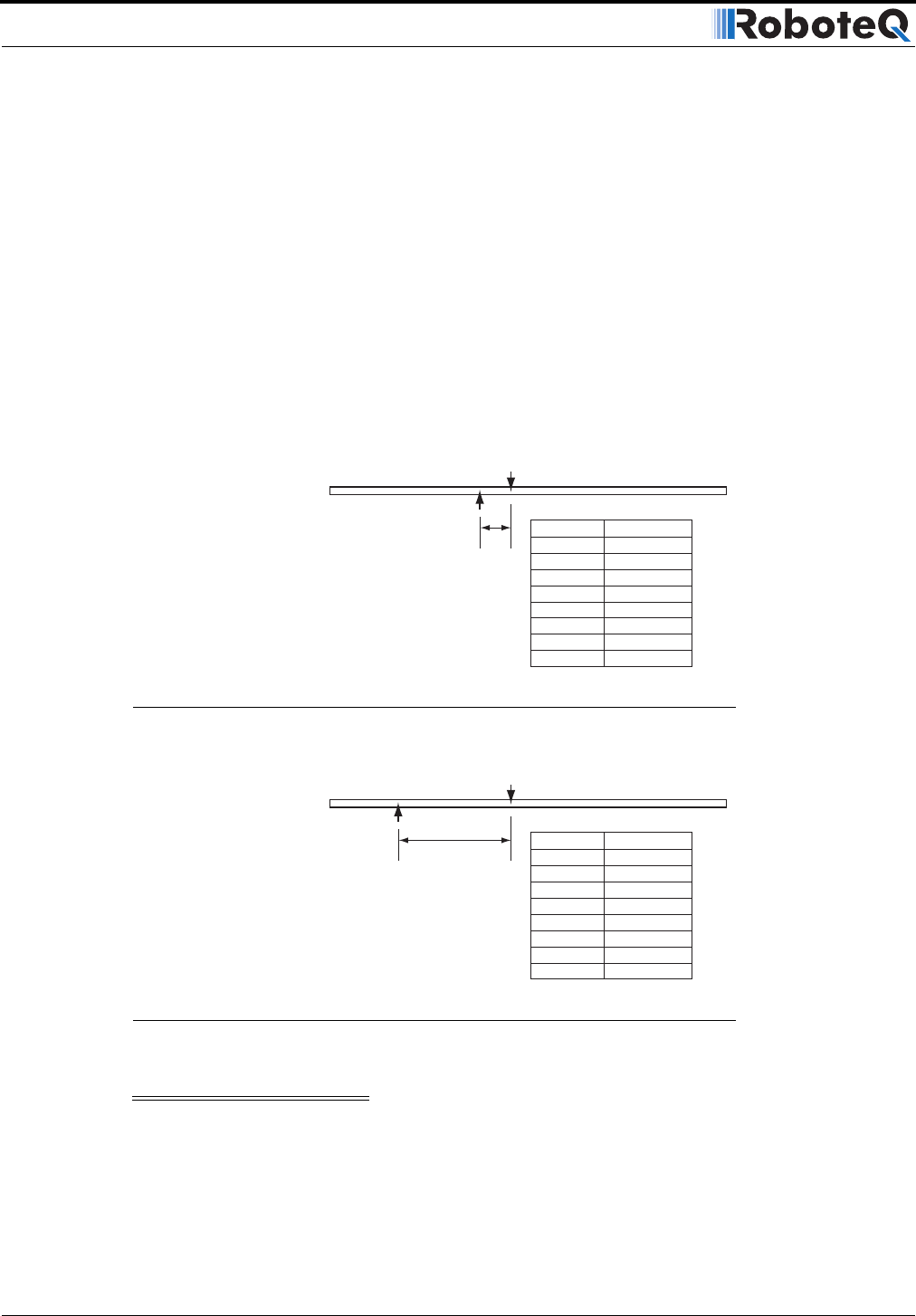
The actual formula is as follows:
Distance = (Destination - Counter value) / Divider
Where: divider is a configurable parameter of value 1, 2, 4, 8, 16, 32, 64 or 127
If computed distance is less than -127, then reported distance is -127
If computed distance is larger than +127, then reported distance is +127
Important Notice
Encoders do not report an absolute position value but a count that is relative to the
point where the motor shaft was at power up. It is typically necessary to have the
motors moved to a “home” position and reset the counters at that reference point.
Destination= 50,050
distance at divider
50 1
25 2
12 4
6 8
3 16
1 32
0 64
0 128
Counter= 50,000
FIGURE 55. Small distance computation example
Destination= 50,000
distance at divider
127 1
127 2
127 4
127 8
127 16
127 32
78 64
39 128
Counter= 45,000
FIGURE 56. Large distance computation example