


















7-27
Contents and display
Extension
function
code
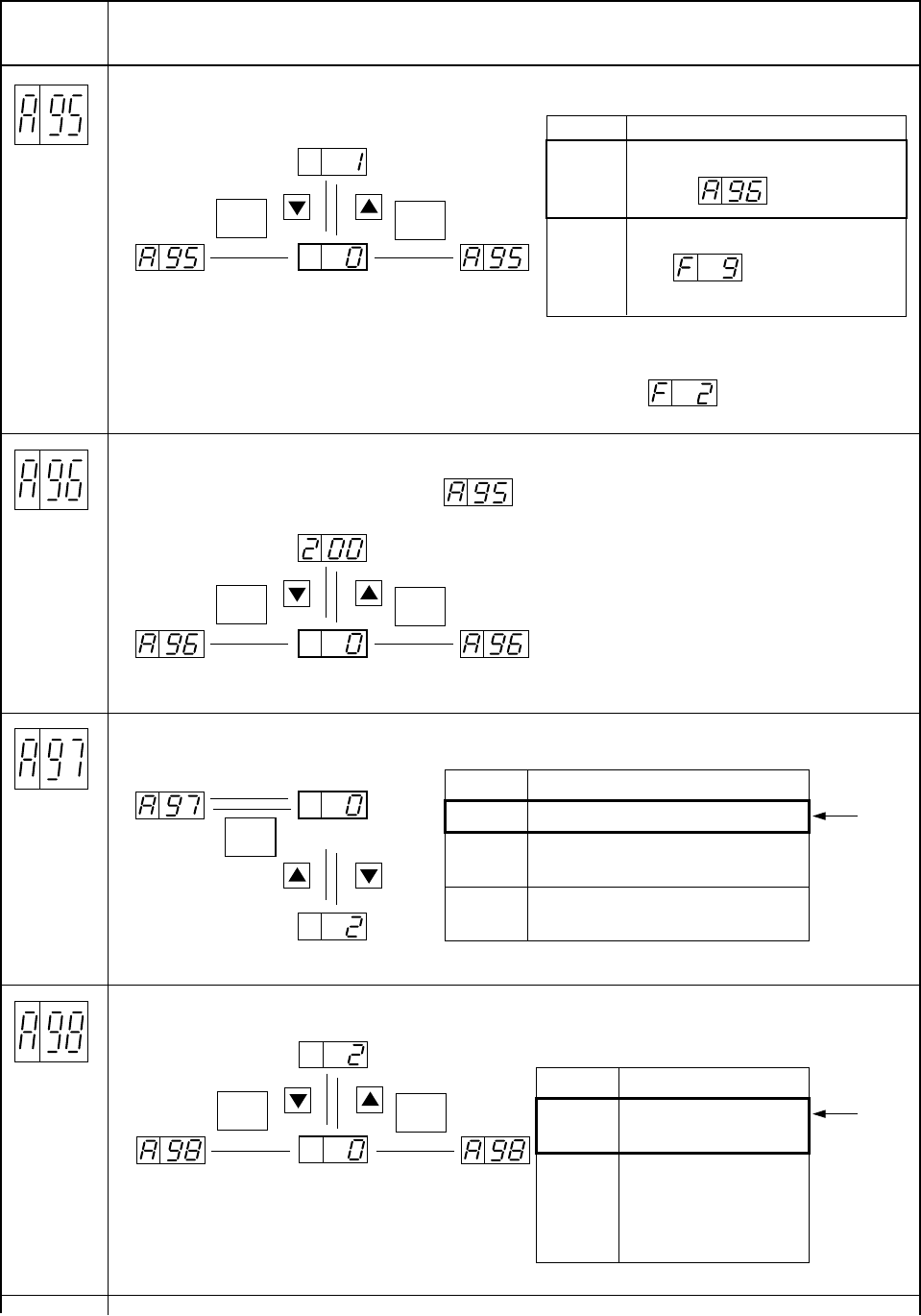
This function is used to set a target value level of PID controlling within 0 to 200%.
This function is valid when 0 is set for .
Target
value
setting
method
selection
This function is used to select a method to enter the target value for executing each PID function.
NOTE 1:
NOTE 2:
Set "1" when a PID optional board (J-PI) is used.
The value entered to the OS terminal of J-PI is assumed as the target value.
The target value at set "1" is O-L, OI-L input signal, setting or multispeed
setting.
Set value
Performance
Internal
target
value level
setting
➤
➤
1
➤
FUNC
FUNC
➤
2
Setting method
Initial value
0
1
The target value depends
on the level set value.
The target value is set using
the frequency setting
method.
➤
➤
1
➤
FUNC
FUNC
➤
2
Setting method
Initial value
If an analog voltage is entered as a feedback
value, the feedback voltage (0 to 10V)
corresponds to this target value level
setting (0 to 200%). In other words, if,
when 5V is entered as the target feedback
value of a sensor, it is converted to an
internal target value, set 100% as this
internal target value.
Select whether to start auto tuning as well as a mode. When 1 or 2 is set, auto tuning is started
during the first operation.
Auto
tuning
setting
➤
➤
➤
FUNC
2
Initial value
Motor
data
selection
1
Set value
0
1
2
Function
Auto tuning is not performed.
Normal measurement mode
(The motor runs.)
R1, R2, or L measurement mode
(The motor does not run.)
Initial
value
Select the motor constant used for sensorless vectror control (SLV).
Set value
0
1
2
Data used
Old Hitachi general-
purpose motor data
New Hitachi general
purpose motor data
(ÒThe MotorÓ)
Auto tuning data
Initial
value
(For details of auto tuning, see Appendix 1.)
➤
➤
1
➤
FUNC
FUNC
➤
2
Initial value
➤