



















45
CHAPTER 3 SPECIFICATIONS
3
3.2 Function List
3.2 Function List
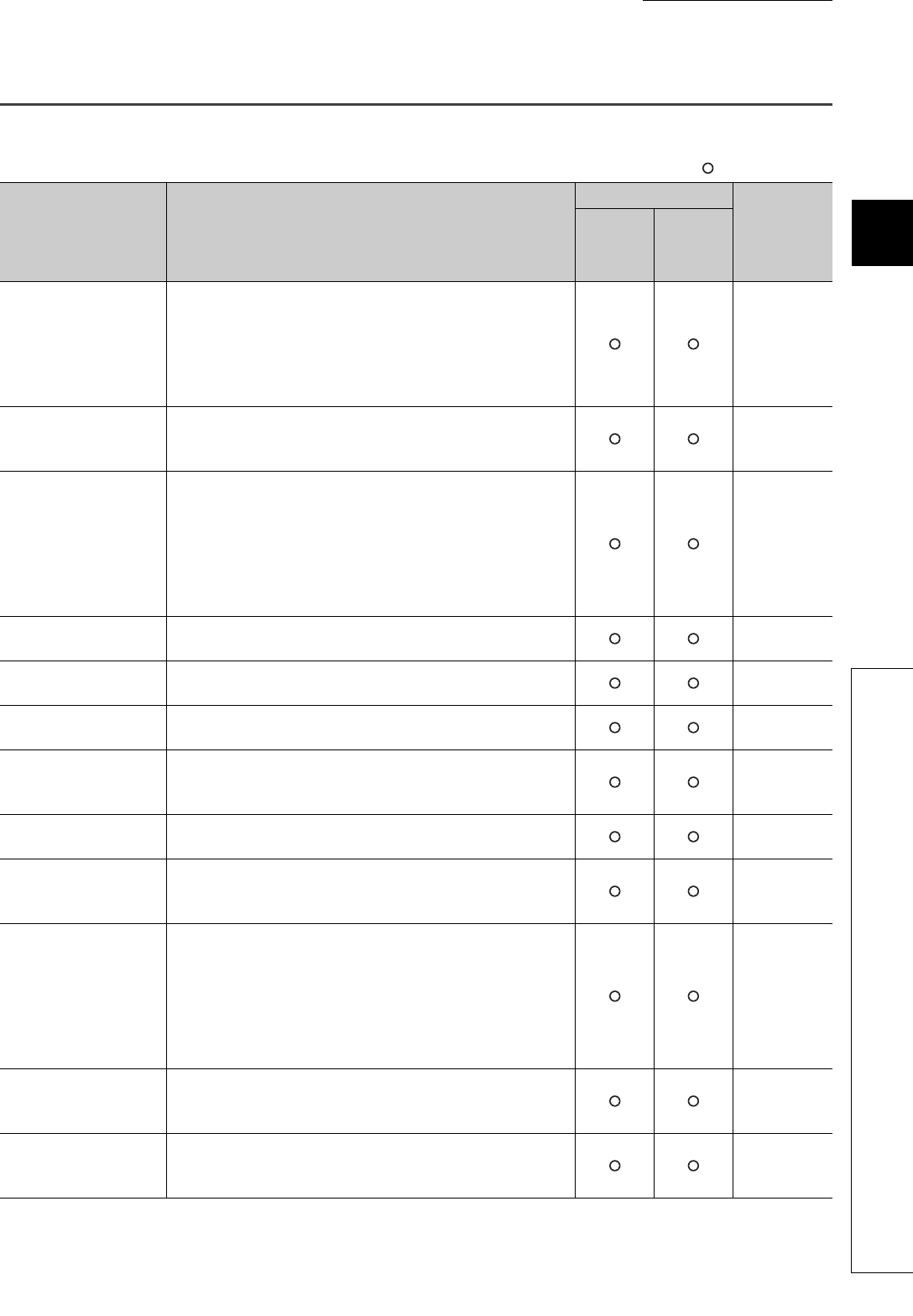
This section lists the Q64TCN functions.
: Enable, ×: Disable
Item Description
Enable or disable
Reference
Standard
control
Heating-
cooling
control
Control mode selection
function
The control mode can be selected from the following modes.
• Standard control
• Heating-cooling control (normal mode)
• Heating-cooling control (expanded mode)
• Mix control (normal mode)
• Mix control (expanded mode)
Page 162,
Section 4.1
Control output setting at
CPU stop error
Whether to clear or hold the transistor output status when a CPU
stop error occurs or when a CPU module is turned from RUN to
STOP can be selected.
Page 165,
Section 4.2
Control method
The following control methods can be used with the settings of
proportional band (P), integral time (I), and derivative time (D).
• Two-position control
•P control
•PI control
• PD control
• PID control
Page 166,
Section 4.3
Manual reset function
The stable status position in the P control or PD control can be
moved manually.
Page 173,
Section 4.4
Manual control
The manipulated value (MV) can be set manually by users without
automatic calculation by the PID control.
Page 175,
Section 4.5
Auto tuning function The Q64TCN sets the optimal PID constants automatically.
Page 176,
Section 4.6
Simple two-degree-of-
freedom
In addition to the PID control, the response speed responding to
the change of the set value (SV) can be selected from three levels.
The simple two-degree-of-freedom PID control can be realized.
Page 188,
Section 4.7
Derivative action
selection function
Dynamic performance can be improved by selecting the suitable
derivative action for the fixed value action and the ramp action.
Page 189,
Section 4.8
Setting change rate
limiter setting function
Change rate setting of the set value (SV) per set time unit when
this value is changed. The batch setting or individual setting can be
selected for the temperature rise and drop.
Page 190,
Section 4.9
Moving averaging
process to a temperature
process value (PV)
Moving averaging process can be set to a temperature process
value (PV). With this function, the fluctuation of temperature
process values (PV) can be reduced in electrically noisy
environments or in the environments where temperature process
values (PV) fluctuate greatly. The moving averaging process can
be disabled to hasten the response to the change of temperature
process values (PV).
Page 191,
Section 4.10
Temperature process
value (PV) scaling
function
The temperature process value (PV) can be converted to the set
width and this value can be imported into the buffer memory.
Page 192,
Section 4.11
Alert function
The modules goes to the alert status when the temperature
process value (PV) or deviation (E) meets the condition set in
advance.
Page 194,
Section 4.12