



















Chapter 4 Explanation of Functions
4.3.16 Zero-return function (ORG, ORL)
- One of three types of zero-return operations can be selected by zero-return mode selection (P068).
When a zero-return operation ends, the current position counter is cleared (to 0).
- Use zero-return direction selection (P069) to select the direction of zero-return operation.
- If zero-return operation is not performed, position control is performed based on the assumption that the
motor position detected at power-on is the origin.
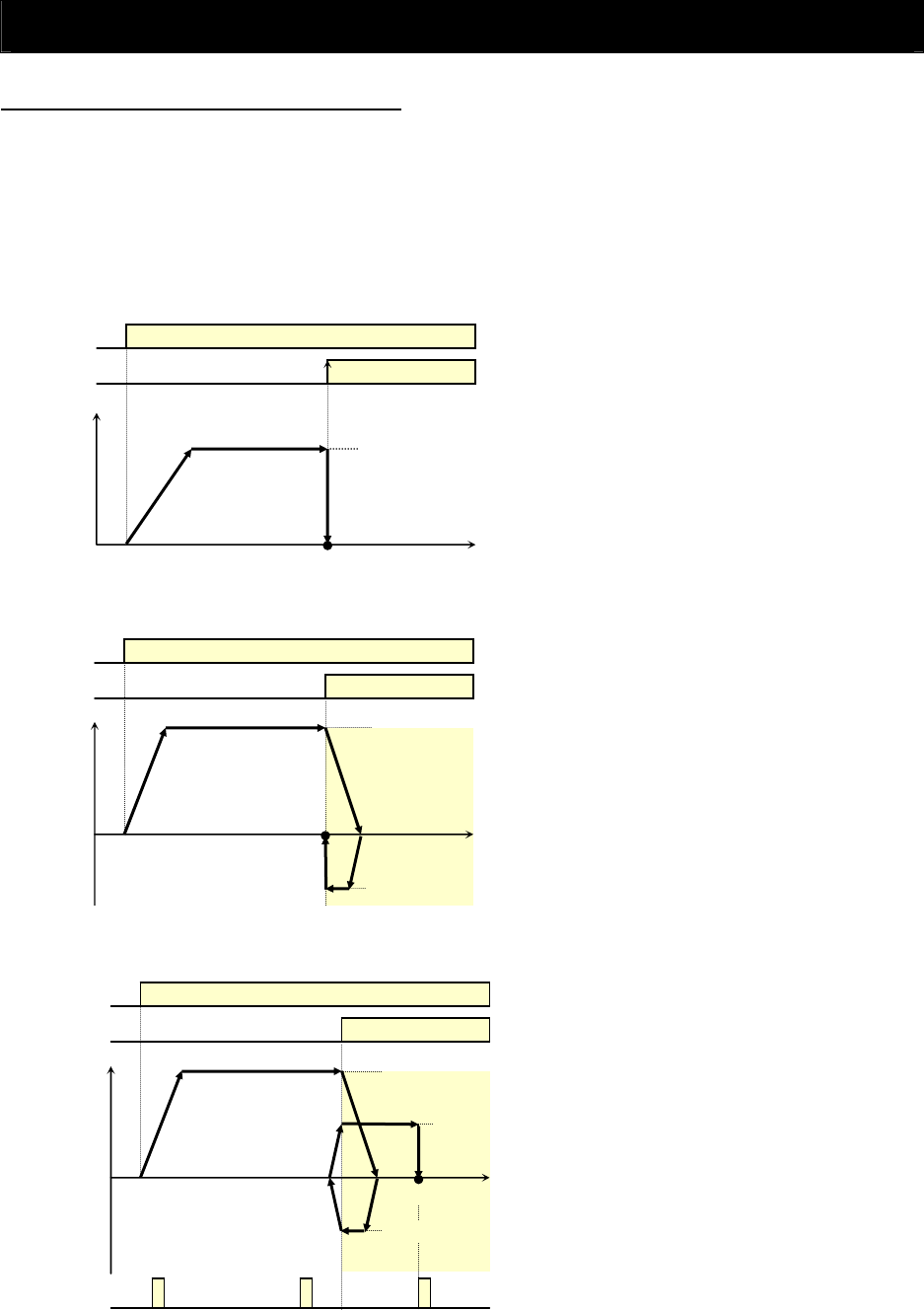
<1> Low-speed zero-return
Output frequency
(2)
(1)
ON
ON
(3)
Origin
Low-speed zero-return speed
(P070)
ORL terminal
ORG terminal
(1) The inverter accelerates the motor for
the specified acceleration time to the
low-speed zero-return speed.
(2) The inverter runs the motor at the
low-speed zero-return speed.
(3) The inverter performs positioning
when the ORL signal is input.
Position
<2> High-speed zero-return
<1> The inverter accelerates the motor
for the specified acceleration time to
the high-speed zero-return speed.
ON
ON
ORL terminal
O
ORG terminal
(1)
(2)
(3)
(4)
(5)
High-speed zero-return
speed (P071)
Origin
Position
Output frequency
Low-speed zero-return speed
(P070)
<2> The inverter runs the motor at the
high-speed zero-return speed.
<3> The inverter starts deceleration
when the ORL signal is turned on.
<4> The inverter runs the motor in the
reverse direction at the low-speed
zero-return speed.
<5> The inverter performs positioning
when the ORL signal is turned off.
<3> High-speed zero-return 2
<1> The inverter accelerates the
motor for the specified acceleration
time to the high-speed zero-return
speed.
ON
ON
ORL terminal
ORG terminal
(1)
(2)
(3)
(4) (5)
(6) (7)
high-speed zero-return speed
(P071)
Origin
Position
Output frequency
Low-speed zero-return speed
(P070)
<2> The inverter runs the motor at the
high-speed zero-return speed.
<3> The inverter starts deceleration
when the ORL signal is turned on.
<4> The inverter runs the motor in the
reverse direction at the low-speed
zero-return speed.
<5> The inverter starts deceleration
when the ORL signal is turned off.
<6> The inverter runs the motor in the
forward direction at the low-speed
zero-return speed.
Z pulse
<7> The inverter performs positioning at the first Z pulse position after the ORL signal is turned on.
4 - 112