





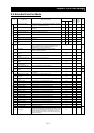
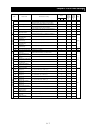
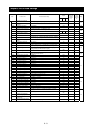


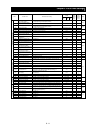
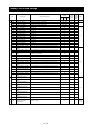


Chapter 8 List of Data Settings
8 - 9
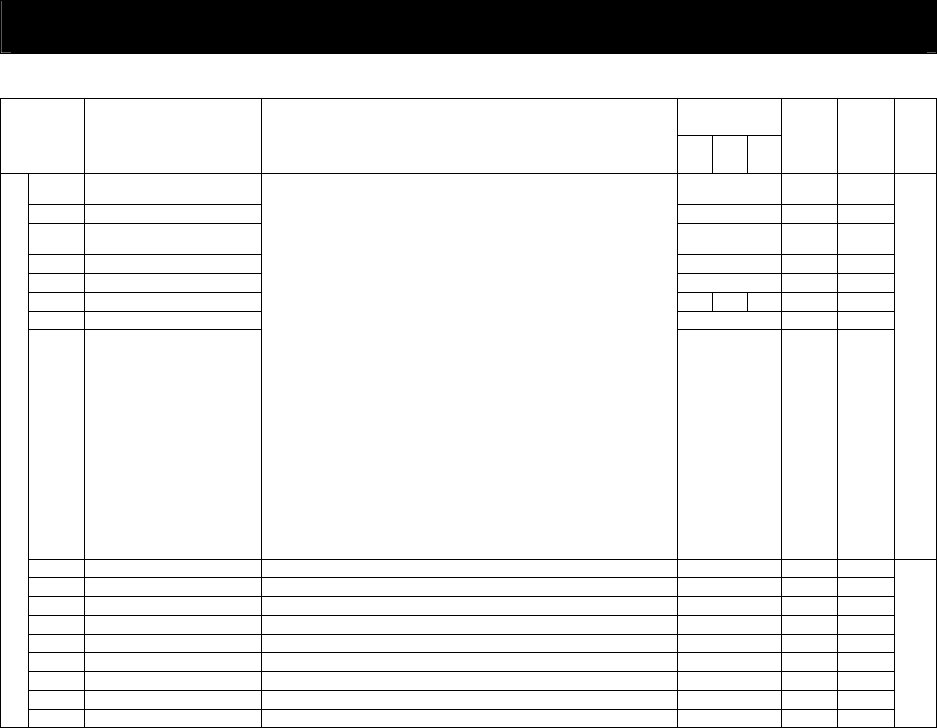
Default
Code Function name Monitored data or setting
_FF _FEF _FUF
Setting
during
operation
(allowed
or not)
Change
during
operation
(allowed
or not)
Page
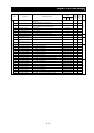
C001 Terminal [1] function (*2)
18
(*2)
¯ {
C002 Terminal [2] function 16
¯ {
C003 Terminal [3] function (*2)
06
(*2)
¯ {
C004 Terminal [4] function 11
¯ {
C005 Terminal [5] function 09
¯ {
C006 Terminal [6] function 03 03 13
¯ {
C007 Terminal [7] function 02
¯ {
C008 Terminal [8] function
01 (RV: Reverse RUN), 02 (CF1: Multispeed 1 setting), 03 (CF2: Multispeed 2
setting), 04 (CF3: Multispeed 3 setting), 05 (CF4: Multispeed 4 setting), 06 (JG:
Jogging), 07 (DB: external DC braking), 08 (SET: Set 2nd motor data), 09 (2CH:
2-stage acceleration/deceleration), 11 (FRS: free-run stop), 12 (EXT: external trip),
13 (USP: unattended start protection), 14: (CS: commercial power source enable),
15 (SFT: software lock), 16 (AT: analog input voltage/current select), 17 (SET3: 3rd
motor control), 18 (RS: reset), 20 (STA: starting by 3-wire input), 21 (STP: stopping
by 3-wire input), 22 (F/R: forward/reverse switching by 3-wire input), 23 (PID: PID
disable), 24 (PIDC: PID reset), 26 (CAS: control gain setting), 27 (UP: remote
control UP function), 28 (DWN: remote control DOWN function), 29 (DWN: remote
control data clearing), 31 (OPE: forcible operation), 32 (SF1: multispeed bit 1), 33
(SF2: multispeed bit 2), 34 (SF3: multispeed bit 3), 35 (SF4: multispeed bit 4), 36
(SF5: multispeed bit 5), 37 (SF6: multispeed bit 6), 38 (SF7: multispeed bit 7), 39
(OLR: overload restriction selection), 40 (TL: torque limit enable), 41 (TRQ1: torque
limit selection bit 1), 42 (TRQ2: torque limit selection bit 2), 43 (PPI: P/PI mode
selection), 44 (BOK: braking confirmation), 45 (ORT: orientation), 46 (LAC: LAD
cancellation), 47 (PCLR: clearance of position deviation), 48 (STAT: pulse train
position command input enable), 50 (ADD: trigger for frequency addition [A145]), 51
(F-TM: forcible-terminal operation), 52 (ATR: permission of torque command input),
53 (KHC: cumulative power clearance), 54 (SON: servo-on), 55 (FOC: forcing), 56
(MI1: general-purpose input 1), 57 (MI2: general-purpose input 2), 58 (MI3:
general-purpose input 3), 59 (MI4: general-purpose input 4), 60 (MI5:
general-purpose input 5), 61 (MI6: general-purpose input 6), 62 (MI7:
general-purpose input 7), 63 (MI8: general-purpose input 8), 65 (AHD: analog
command holding), 66 (CP1: multistage position settings selection 1 ), 67 (CP2:
multistage position settings selection 2), 68 (CP3: multistage position settings
selection 3), 69 (ORL: Zero-return limit function), 70 (ORG: Zero-return trigger
function), 71 (FOT: forward drive stop), 72 (ROT: reverse drive stop), 73 (SPD:
speed / position switching), 74 (PCNT: pulse counter), 75 (PCC: pulse counter
clear), no (NO: no assignment)
01
¯ {
4-46
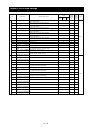
C011 Terminal [1] active state 00 (NO) / 01 (NC) 00
¯ {
C012 Terminal [2] active state 00 (NO) / 01 (NC) 00
¯ {
C013 Terminal [3] active state 00 (NO) / 01 (NC) 00
¯ {
C014 Terminal [4] active state 00 (NO) / 01 (NC) 00
¯ {
C015 Terminal [5] active state 00 (NO) / 01 (NC) 00
¯ {
C016 Terminal [6] active state 00 (NO) / 01 (NC) 00
¯ {
C017 Terminal [7] active state 00 (NO) / 01 (NC) 00
¯ {
C018 Terminal [8] active state 00 (NO) / 01 (NC) 00
¯ {
Intelligent input terminals
C019 Terminal [FW] active state 00 (NO) / 01 (NC) 00
¯ {
4-47
*2 When the emergency stop function is enabled (SW1 = ON), "18" (RS) and "64" (EMR) are forcibly written to parameters "C001" and "C003", respectively. (You cannot arbitrarily write "64" to
"C001".) If the SW1 signal is turned off and then turned on, "no" (no assignment) is set in parameter "C003".