



















96 CHAPTER 3. FUNCTIONAL DESCRIPTION OF Xµ
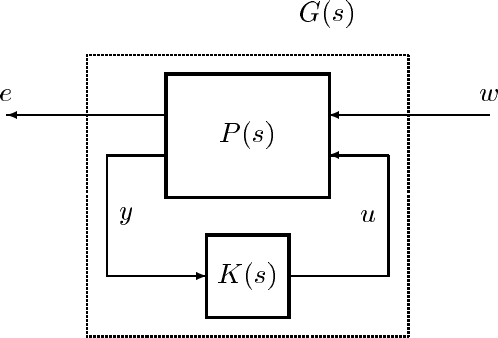
Figure 3.5: Interconnection structure for controller synthesis
structure contains more than just the open loop plant. It typically also contains
frequency dependent weighting functions and specifies the structure of the
interconnection between the open loop plant and the controller. The dimensions of y
and u are specified by nmeas and ncon. The underlying Riccati equations can be solved
by either an eigenvalue or Schur decomposition method. A keyword specifies the desired
Riccati solution method. A simple is example is given at the end of this section.
The hinfsyn function calculates a controller, K(s), which makes G(s)
∞
≤ γ forauser
specified γ. It is not possible to make γ arbitrarily small; there is a minimum value for γ
(referred to as γ
opt
)andγ
opt
is not known a priori in a design problem. Therefore
hinfsyn can also perform a bisection search for the smallest γ>γ
opt
and use this value
of γ for the control design. Again, Section 2.3 gives the relevant theoretical details.
The syntax of hinfsyn is illustrated below. The final bound on the achieved γ is
returned as gfin.
[k,gfin] = hinfsyn(p,nmeas,ncon,gamma)
If gamma is a scalar, the controller achieving that γ value is calculated, if one exists. If
gamma is a two element vector a bisection search for the smallest γ value is performed.
The function displays various intermediate calculations related to the eigenvalues of the
Hamiltonian and the positivity of the Riccati solutions. As γ approaches γ
opt
the Riccati