



















2.2. MODELING UNCERTAIN SYSTEMS 17
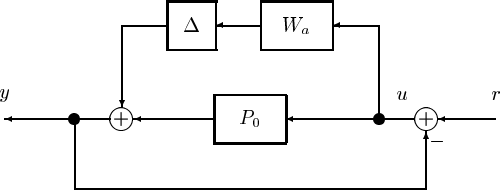
Figure 2.4: Unity gain negative feedback for the example system, P
0
+∆W
a
2.2.2 Linear Fractional Transformations
A model is considered to be an interconnection of lumped components and perturbation
blocks. In this discussion we will denote the input to the model by u, which can be a
vector valued signal representing input signals such as control inputs, disturbances, and
noise. The outputs signal, denoted in this discussion by y, are also vector valued and can
represent system outputs and other variables of interest.
In order to treat large systems of interconnected components, it is necessary to use a
model formulation that is general enough to handle interconnections of systems. To
illustrate this point consider an affine model description:
y =(P
0
+∆W
a
)u, ∆
∞
≤ 1, (2.4)
where u is the input and y is the output. ∆ again represents an unknown but bounded
perturbation. This form of perturbed model is known as an additive perturbation
description. While such a description could be applied to a large class of linear systems,
it is not general enough to describe the interconnection of models. More specifically, an
interconnection of affine models is not necessarily affine. To see this, consider unity gain
positive feedback around the above system. This is illustrated in Figure 2.4.
The new input-output transfer function is
y =(P
0
+∆W
a
)[I +(P
0
+∆W
a
)]
−1
r. (2.5)
It is not possible to represent the new system with an affine model. Note that stability
questions arise from the consideration of the invertibility of [I +(P
0
+∆W
a
)].