



















AX2550 Motor Controller User’s Manual 129
Data Logging in Analog Mode
• Internal Heat Sink temperatures 1 and 2
• Main Battery voltage
• Internal 12V voltage
• Encoder Speed or Position (AX2850)
The entire string is repeated every 213 milliseconds with the latest internal parameter val-
ues. This information can be logged using the Roborun Utility (see “Viewing and Logging
Data in Analog and R/C Modes” on page 192). It may also be stored in a PDA that can be
placed in the mobile robot.
The string and data format is described in “Analog and R/C Modes Data Logging String For-
mat” on page 166. The serial port’s output can be safely ignored if it is not required in the
application.
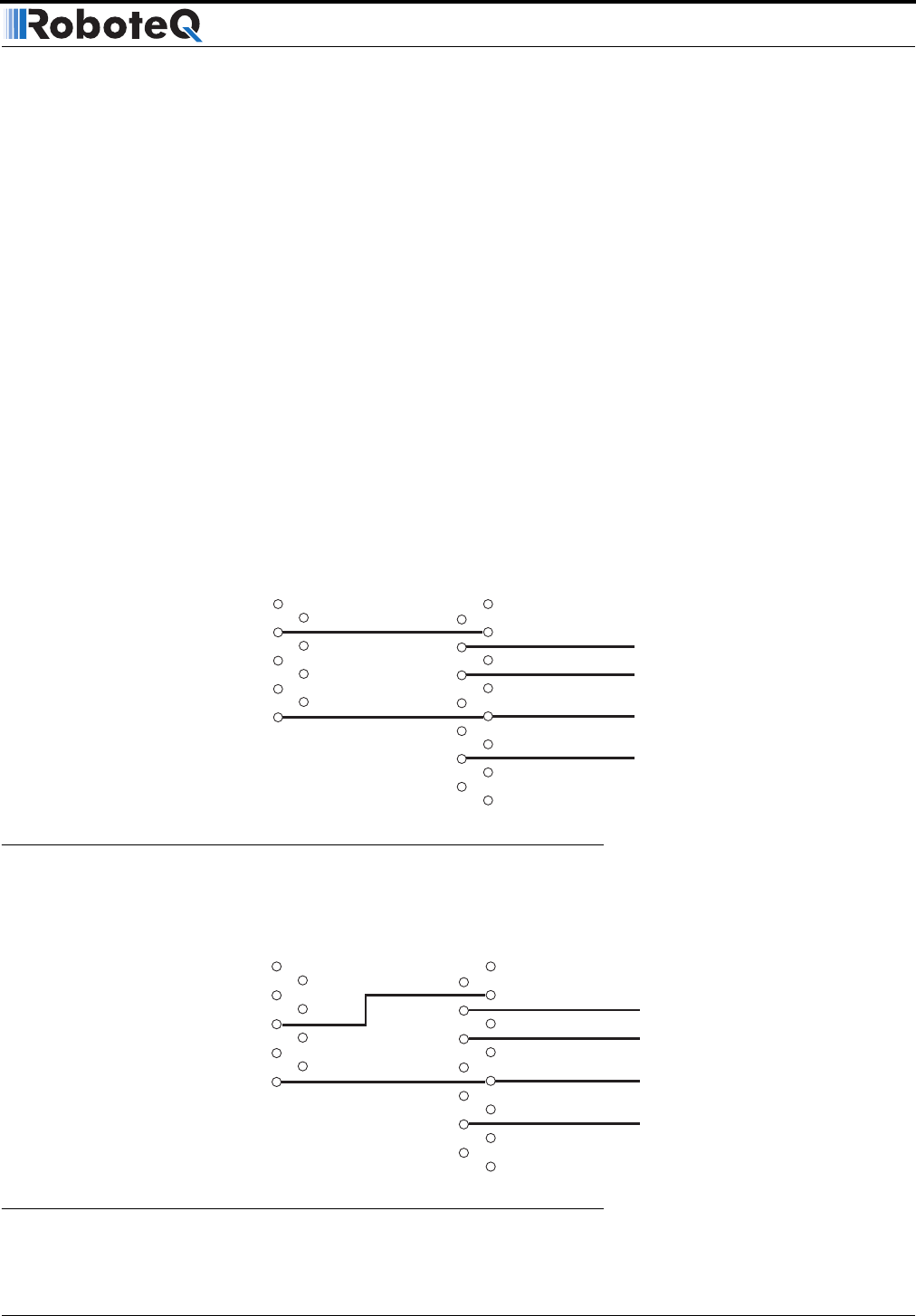
To read the output string while operating the controller with an analog command, the cable
must be modified to add an RS232 output wire and connector that will be connected to the
PC’s communication port. Figure 87 below shows the wiring diagram of the modified cable
for connection to a PC or to a PDA, respectively.
1
2
3
4
7
8
9
5
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
6
RX Data
RS232 Data Out
GND
Ana Ch2
Ana Ch1
+5V
GND
DB9 Female
To PC
DB15 Male
To Controller
FIGURE 87. Modified Analog cable with RS232 output data logging for PC
1
2
3
4
7
8
9
5
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
6
RX Data
RS232 Data Out
GND
Ana Ch2
Ana Ch1
+5V
GND
DB9 Male
To PDA
DB15 Male
To AX2500
FIGURE 88. Modified Analog cable with RS232 output data logging for PDA