



















AX2550 Motor Controller User’s Manual 51
Activating Brake Release or Separate Motor Excitation
Activating Brake Release or Separate Motor Excitation
The controller may be configured so that the Output C will turn On whenever one of the
two motors is running. This feature is typically used to activate the mechanical brake
release sometimes found on motors for personal mobility systems. Likewise, this output
can be used to turn on or off the winding that creates the armature’s magnetic field in a
separate excitation motor. This function is disabled by default and may be configured using
the Roborun PC utility. See “Loading, Changing Controller Parameters” on page 181. See
“Connecting devices to Output C” on page 59 for details on how to connect to the output.
Emergency Shut Down Using Controller Switches
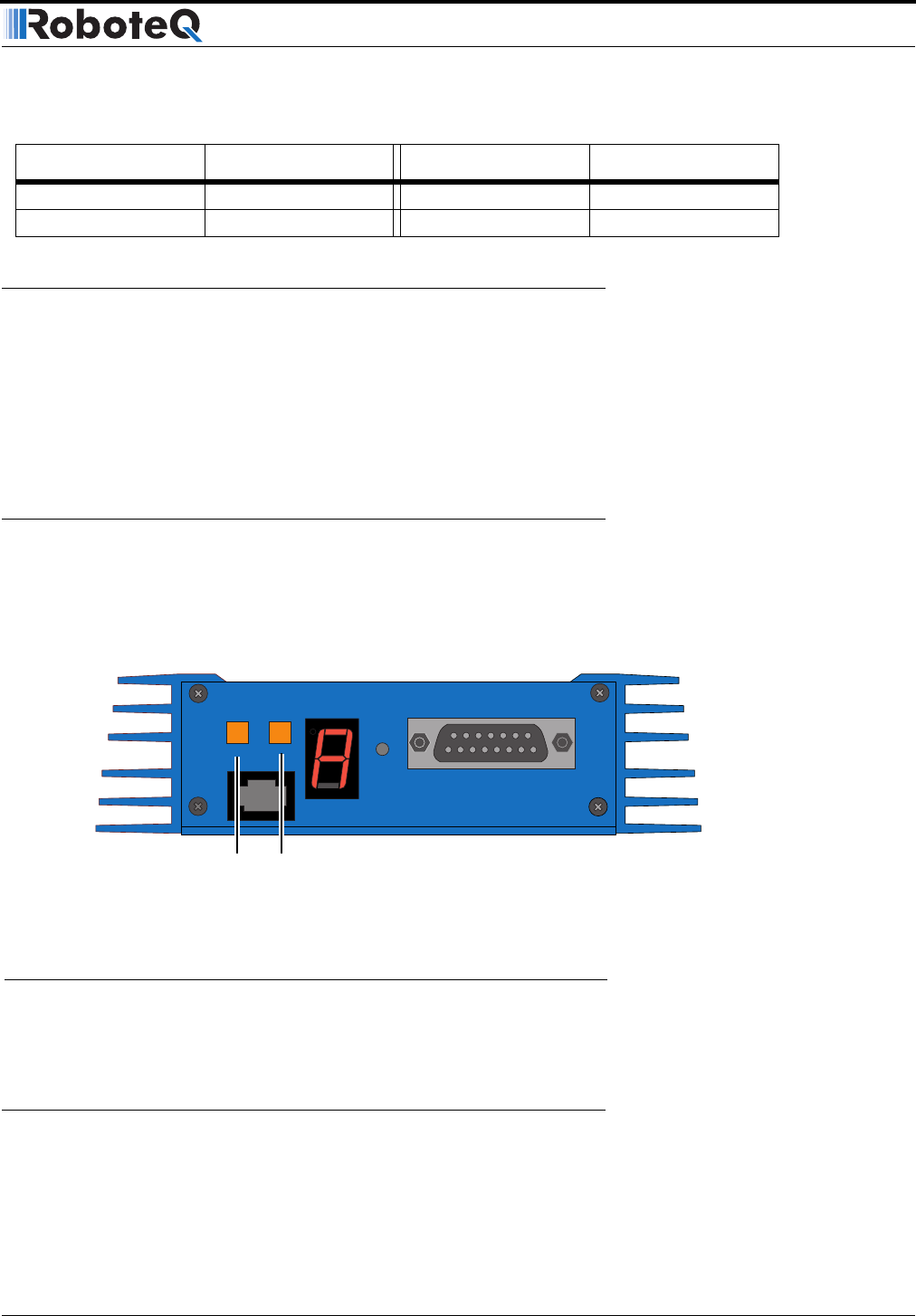
In case of emergency, it is possibly to cause the controller to cut off the power to the
motors by depressing the Program and Set buttons simultaneously as shown in the figure
below. The controller will stop immediately without delay.
After and Emergency Stop condition, the controller must be reset or powered Off
and On to resume normal operation.
Emergency Stop using External Switch
An external switch can be added to the AX2550 to allow the operator to stop the control-
ler’s output in case of emergency. This controller input can be configured as the “Inverted”
detection instead of Emergency Stop. The factory default for this input is “No Action”.
5 -1.5% 12 4.5%
6 -0.75% 14 5.25%
TABLE 8. Left/Right Adjustment Parameter selection
Parameter Value Speed Adjustment Parameter Value Speed Adjustment
Program Set
Reset
Press the two buttons
simultaneously to cause an
emergency stop
FIGURE 23. Activating an Emergency Stop