



















Serial (RS-232) Controls and Operation
138 AX2550 Motor Controller User’s Manual Version 1.9b. June 1, 2007
RS-232 Watchdog
For applications demanding the highest operating safety, the controller may be configured
to automatically stop the motors (but otherwise remain fully active) if it fails to receive a
character on its RS232 port for more than 1 seconds.
The controller will also send a “W” character every second to indicate to the microcom-
puter that such a time-out condition has occurred.
The character does not need to be a specific command, but any ASCII code, including invis-
ible ones.
The RS232 watchdog is enabled or disabled depending on the value of the “Input Com-
mand Mode” parameter.
The RS232 watchdog is automatically enabled when entering the RS232 mode from the
RC or from the Analog modes (see “Entering RS232 from R/C or Analog mode” on
page 136)
Controller Commands and Queries
AX2550 commands and queries are composed of a series of 2 or 4 characters followed by
the “enter” (carriage return) code.
The controller will send back (echo) every character it is receiving. By checking that the
returned character is the same as the one sent, it is possible to verify that there has been
no error in communication.
After a command has been received and properly executed, the controller will send the
“+” character.
If a command has been received with errors or bad parameters, the controller will send the
“-” character.
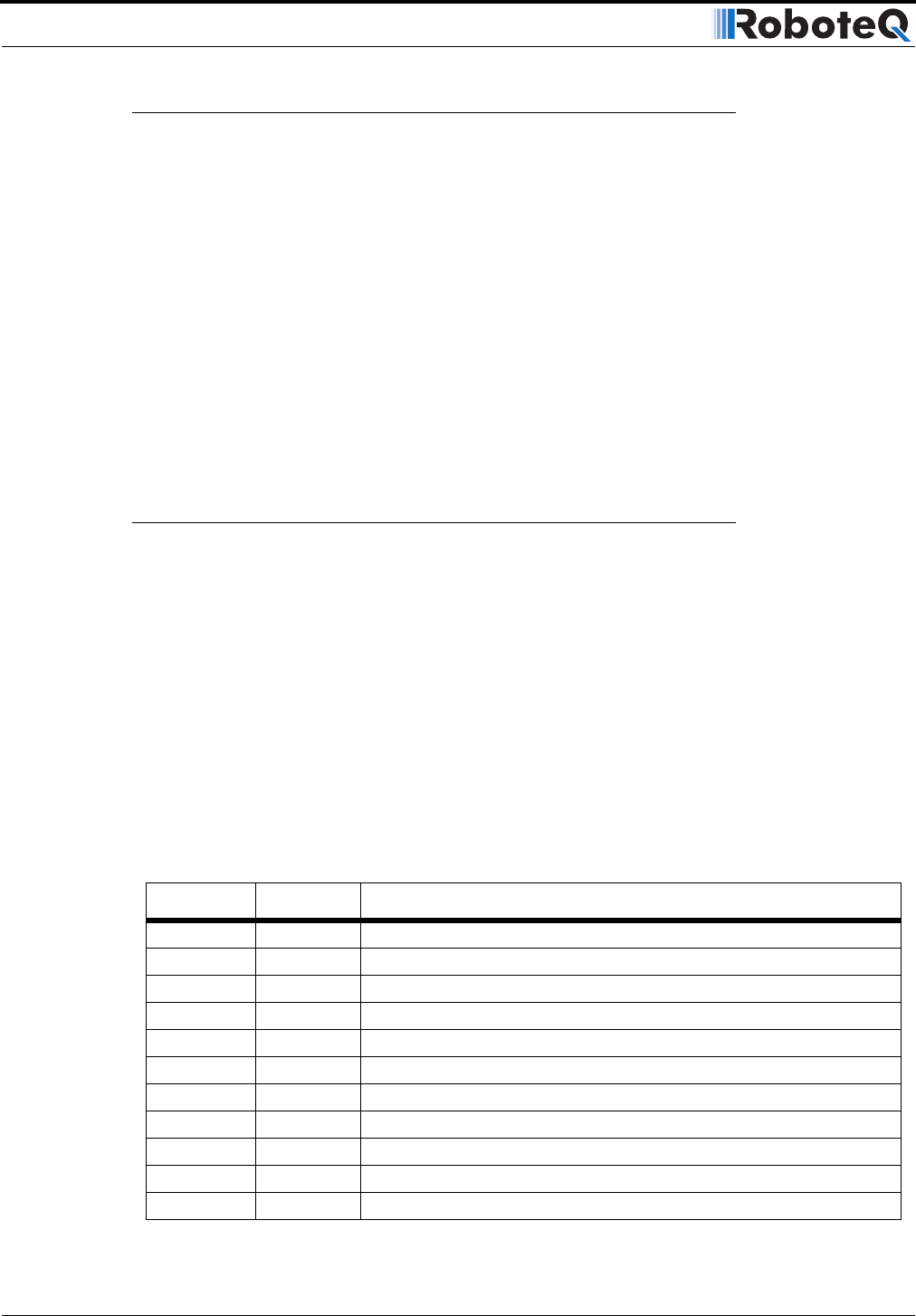
The table below lists the AX2550 RS232 commands and queries
TABLE 24. Controller’s basic Commands and Queries
Command Type Description
%rrrrrr Command Reset Controller
!Ann Command Channel 1, forward command to value nn
!ann Command Channel 1, reverse command to value nn
!Bnn Command Channel 2, forward command to value nn
!bnn Command Channel 2, reverse command to value nn
!C Command Turn Accessory Output C n
!c Command Turn Accessory Output C Off
?a or ?A Query Read Battery Amps
?v or ?V Query Read Power Level applied to motors
?p or ?P Query Read Analog Inputs 1 and 2
?r or ?R Query Read Analog Inputs 3 and 4