


















Customizing for Your Application 8-13
8.6 Sensorless Vector Control
Ensure that the following parameters are entered correctly for optimal performance in
Sensorless vector control.
P30: Select motor type connected to inverter output.
H32: Enter rated slip frequency based on motor nameplate RPM and rated frequency
(See 10-6).
P32: Enter motor nameplate rated current.
H34: After removing the load, set H40[Control mode Selection] to “0” [V/F control] and
run the motor at 60Hz. Enter the current displayed in Cur-[Output current] as motor no
load current. If it is difficult to remove the load from the motor shaft, enter a value
equal to 40 to 50% of H33[Motor rated current] or the factory default.
H42, H44: Enter the value of the parameter measured during H41[Auto tuning] or the
factory default.
F14: This parameter accelerates the motor after pre-exciting the motor for the set
time. The amount of the pre-exciting current is set in H34[Motor No Load Current].
Directly enter the motor nameplate value except motor rating when 0.2kW is used.
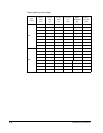
Group Display Parameter Name Setting Range Default Unit
H - Function
group 2
H40 [Control Mode Selection] 3 0 to 3 0 -
P30 [Motor Type Selection] - 0.2 to 7.5 - kW
H32 [Rated Slip Frequency] - 0 to 10 - Hz
P32 [Motor Rated Current] - 0.5 to 50 - A
H34 [Motor No Load Current] - 0.1 to 20 - A
H42 [Stator Resistance (Rs)] - 0 to 14 - W
H44 [Leakage Inductance (L
σ)] - 0 to 300.00 - mH
Function
group 1
F14 [Time for Energizing a Motor] - 0.0 to 60.0 0.1 sec
If H40[Control mode Selection] is set to “3”, Sensorless vector control will become active.
!
ATTENTION:Motor parameters should be measured for
optimal performance. It is highly recommended H41 [Auto
tuning] be done prior to operating via Sensorless vector
control.