



















Chapter 6 Control Modes of Operation|ASDA-B Series
6-30 Revision February 2008, Doc. Name: 2006PDD23000009
6.5.2 Speed / Torque Control Mode Selection
S-T Mode:
The speed command can be the external analog voltage or internal parameters (P1-09 to P1-11) and
SPD0~1 is used to select speed command. The same as speed command, the torque command can be
the external analog voltage or internal parameters (P1-12 to P1-14) and TCM0~1 is used to select
torque command. The speed and torque mode switching is controlled by the S-T signal.
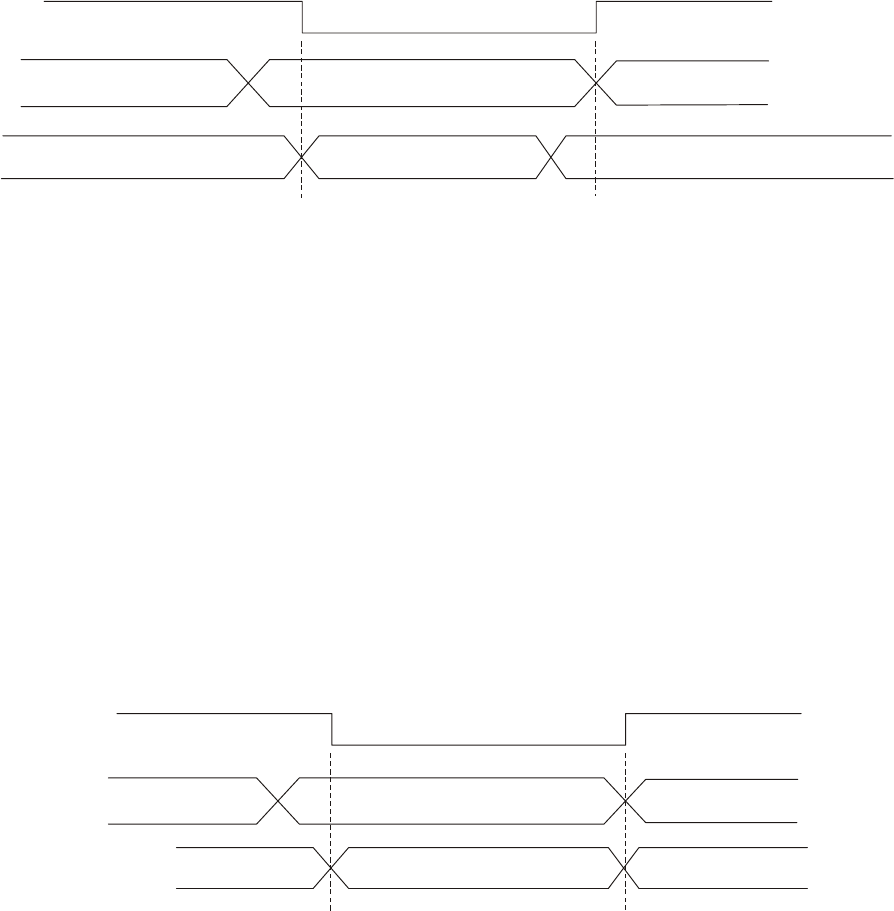
The timing chart of speed / torque control mode selection is shown as the figure below:
ON
NOT CARE
NOT CARE
OFF
ON
S-T
NOT CARE
Speed source is determined
by SPD0~1
Torque source is determined
by TCM0~1
Speed ModeTorque Mode Torque Mode
Torque source is determined
by TCM0~1
In torque mode (when S-T is ON), torque command is selected by TCM0~1. When switching to the
speed mode (when S-T is OFF), the speed command is selected by SPD0~1, and then the motor will
immediately rotate following the command. After S-T is ON again, it will immediately return to torque
mode.
6.5.3 Torque / Position Control Mode Selection
T-P Mode:
The command source of T-P mode is from external input pulse. The torque command can be the
external analog voltage or internal parameters (P1-12 to P1-14). The torque and position mode
switching is controlled by the T-P signal.
The timing chart of speed / position control mode selection is shown as the figure below:
ON
NOT CARE
Torque source is determined
by TCM0~1
Counting Pulse
Position Mode
NOT CARE
OFF
ON
T-
P
Torque Mode Position Mode
Counting Pulse
Stop Counting Pulse
In position mode (when T-P is ON), the motor will start to count pulse and operate following the external
pulse command. When switching to the torque mode (when T-P is OFF), it will stop counting pulse even
if the pulse command is continuously sent out. The torque command is determined by TCM0~1 and the
motor will rotate following the command. After T-P is ON again, it will immediately return to position
mode.