



















AX1500 Motor Controller User’s Manual 117
Analog Deadband Adjustment
Analog Deadband Adjustment
The controller may be configured so that some amount of potentiometer or joystick travel
off its center position is required before the motors activate. The deadband parameter can
be one of 8 values, ranging from 0 to 7, which translate into a deadband of 0% to 16%.
Even though the deadband will cause some of the potentiometer movement around the
center position to be ignored, the controller will scale the remaining potentiometer move-
ment to command the motors from 0 to 100%.
Note that the scaling will also cause the motors to reach 100% at slightly less than 100%
of the potentiometer’s position. This is to ensure that 100% motor speed is achieved in all
circumstances. Table 19 below shows the effect of the different deadband parameter val-
ues. Changing the deadband parameter can be done using the controller’s switches (see
“Configuring the Controller using the Switches” on page 171) or the Roborun utility on a
PC (see “Loading, Changing Controller Parameters” on page 164).
TABLE 19. Analog deadband parameters and their effects
Parameter Value
Pot. Position resulting in
Motor Power at 0%
Pot. Position resulting in
Motor Power at -/+100%
0 0% 2.5V 94% 0.15V and 4.85V
1 0% to 2.4% 2.44V to 2.56V 96% 0.10V and 4.90V
2 0% to 4.7% 2.38V to 2.62V 93% 0.18V and 4.83V
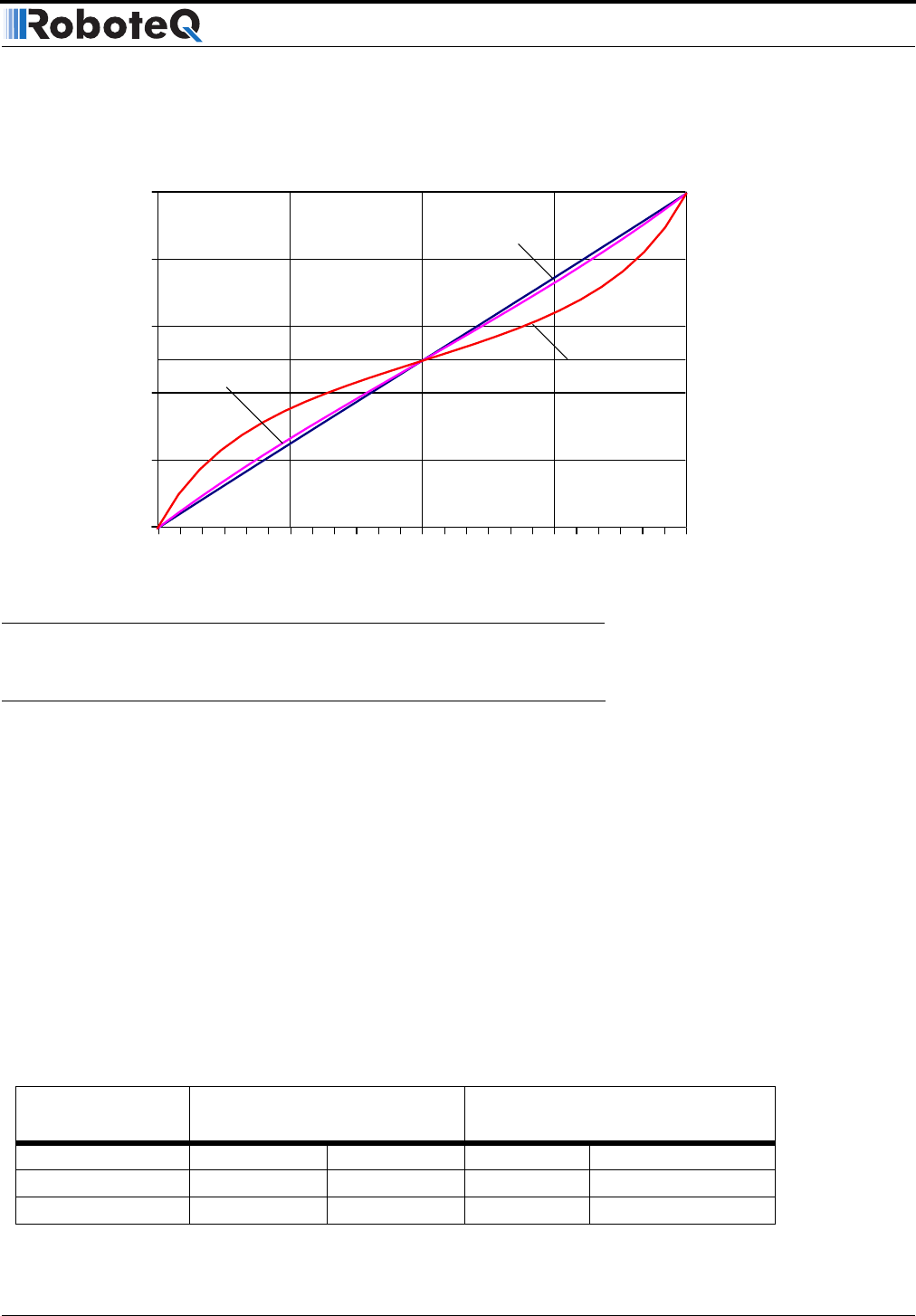
0V
Min MaxCenter
100K Pot10K Pot
1K Pot
Potentiometer Position
Voltage at Input
1V
2V
3V
4V
5V
FIGURE 77. Effect of the controller’s internal resistors on various potentiometers