



















Installing, Connecting and Using the Encoder Mod-
78 AX1500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
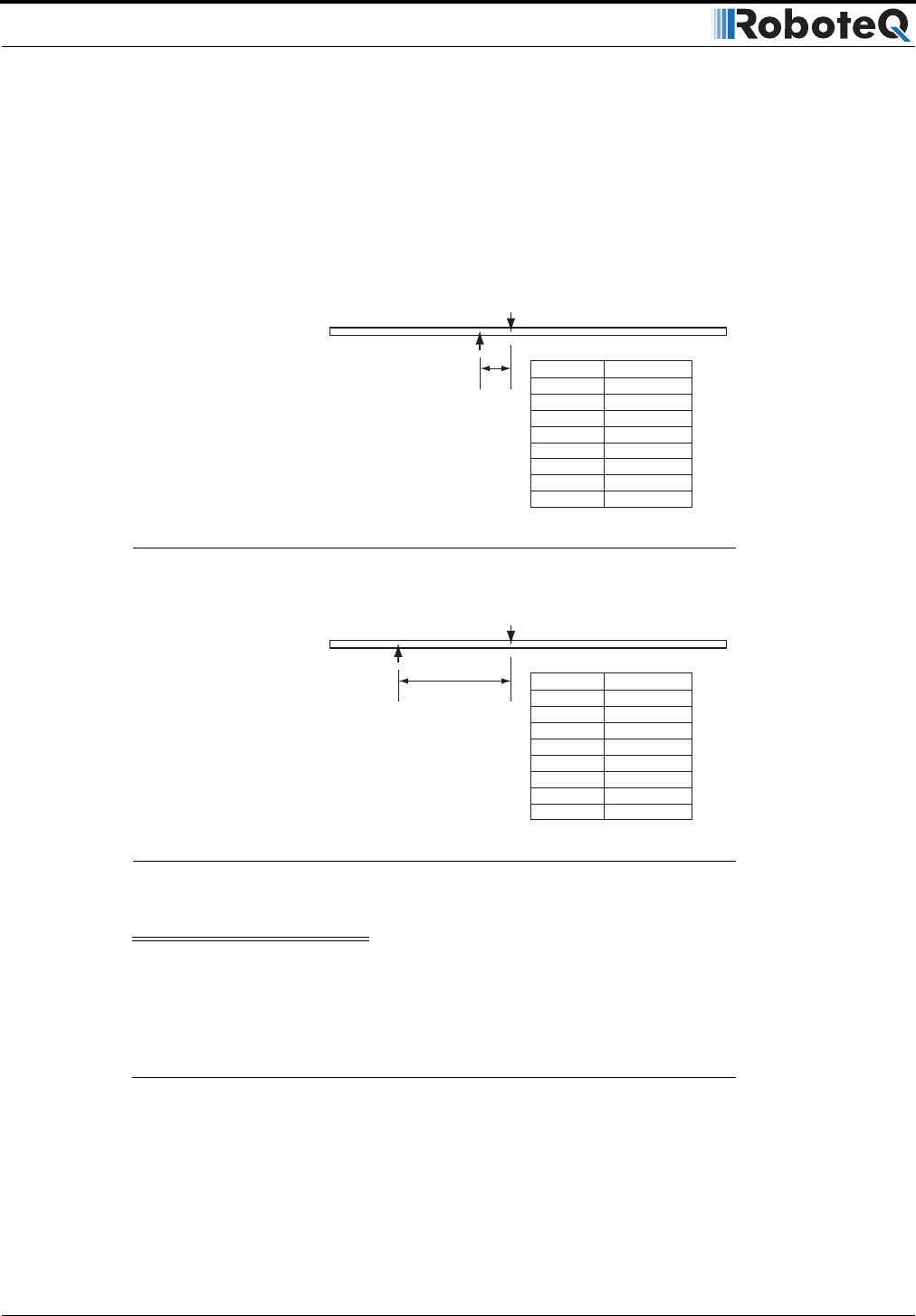
The actual formula is as follows:
Distance = (Destination - Counter value) / Divider
Where: divider is a configurable parameter of value 1, 2, 4, 8, 16, 32, 64 or 127
If computed distance is less than -127, then reported distance is -127
If computed distance is larger than +127, then reported distance is +127
Important Notice
Encoders do not report an absolute position value but a count that is relative to the
point where the motor shaft was at power up. It is typically necessary to have the
motors moved to a “home” position and reset the counters at that reference point.
RS232 Communication with the Encoder Module
The contains its own Microcontroller and firmware in Flash. When present, it responds to a
large set of dedicated commands and queries via the controller’s serial port. See “RS232
Encoder Command Set” on page 145.
Destination= 50,050
distance at divider
50 1
25 2
12 4
6 8
3 16
1 32
0 64
0 128
Counter= 50,000
FIGURE 46. Small distance computation example
Destination= 50,000
distance at divider
127 1
127 2
127 4
127 8
127 16
127 32
78 64
39 128
Counter= 45,000
FIGURE 47. Large distance computation example