



















AX1500 Motor Controller User’s Manual 97
PID tuning in Speed Mode
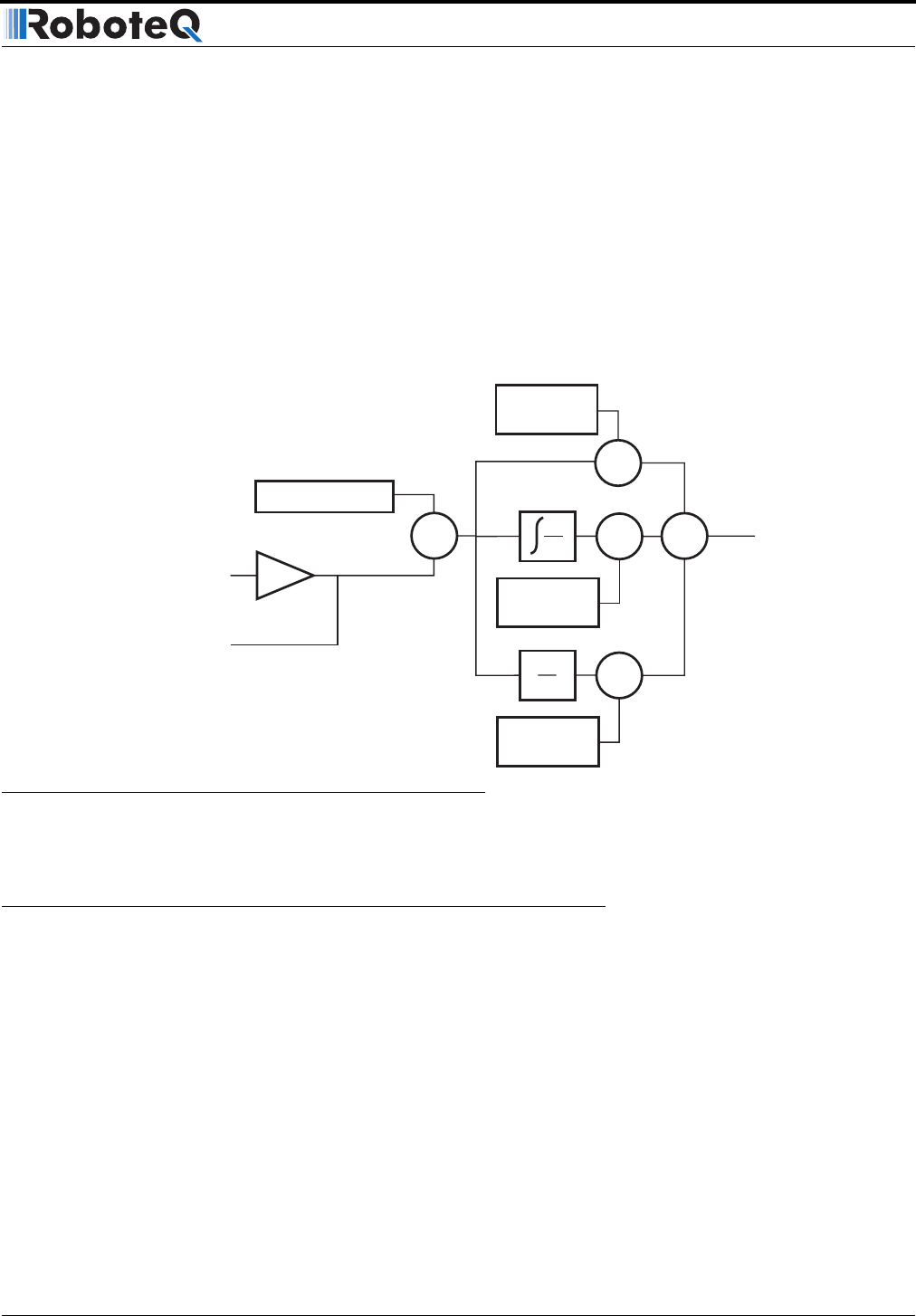
The Differential component of the algorithm computes the changes to the error from one
16 ms time period to the next. This change will be a relatively large number every time an
abrupt change occurs on the desired speed value or the measured speed value. The value
of that change is then multiplied by a user selectable Differential Gain and added to the out-
put. The effect of this part of the algorithm is to give a boost of extra power when starting
the motor due to changes to the desired speed value. The differential component will also
greatly help dampen any overshoot and oscillation.
The Integral component of the algorithm perform a sum of the error over time. This compo-
nent helps the controller reach and maintain the exact desired speed when the error is
reaching zero (i.e. measured speed is near to, or at the desired value).
PID tuning in Speed Mode
As discussed above, three parameters - Proportional Gain, Integral Gain, and Differential
Gain - can be adjusted to tune the Closed Loop Speed control algorithm. The ultimate goal
in a well tuned PID is a motor that reaches the desired speed quickly without overshoot or
oscillation.
Because many mechanical parameters such as motor power, gear ratio, load and inertia are
difficult to model, tuning the PID is essentially a manual process that takes experimenta-
tion.
The Roborun PC utility makes this experimentation easy by providing one screen for chang-
ing the Proportional, Integral and Differential gains and another screen for running and
monitoring the motors. First, run the motor with the preset values. Then experiment with
different values until a satisfactory behavior is found.
Desired Speed
Differential
Gain
Proportional
Gain
E= Error
Output
Measured Speed
Tachometer
or
Optical Encoder
A/D
-
x
Σ
x
dE
dt
Integral
Gain
x
dE
dt
FIGURE 58. PID algorithm used in Speed mode