



















General Operation
40 AX1500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
Selecting the Motor Control Modes
For each motor, the AX1500 supports multiple motion control modes. The controller’s fac-
tory default mode is Open Loop Speed control for each motor. The mode can be changed
using any of the methods described in “Loading, Changing Controller Parameters” on
page 164.
Open Loop, Separate Speed Control
In this mode, the controller delivers an amount of power proportional to the command
information. The actual motor speed is not measured. Therefore the motors will slow
down if there is a change in load as when encountering an obstacle and change in slope.
This mode is adequate for most applications where the operator maintains a visual contact
with the robot.
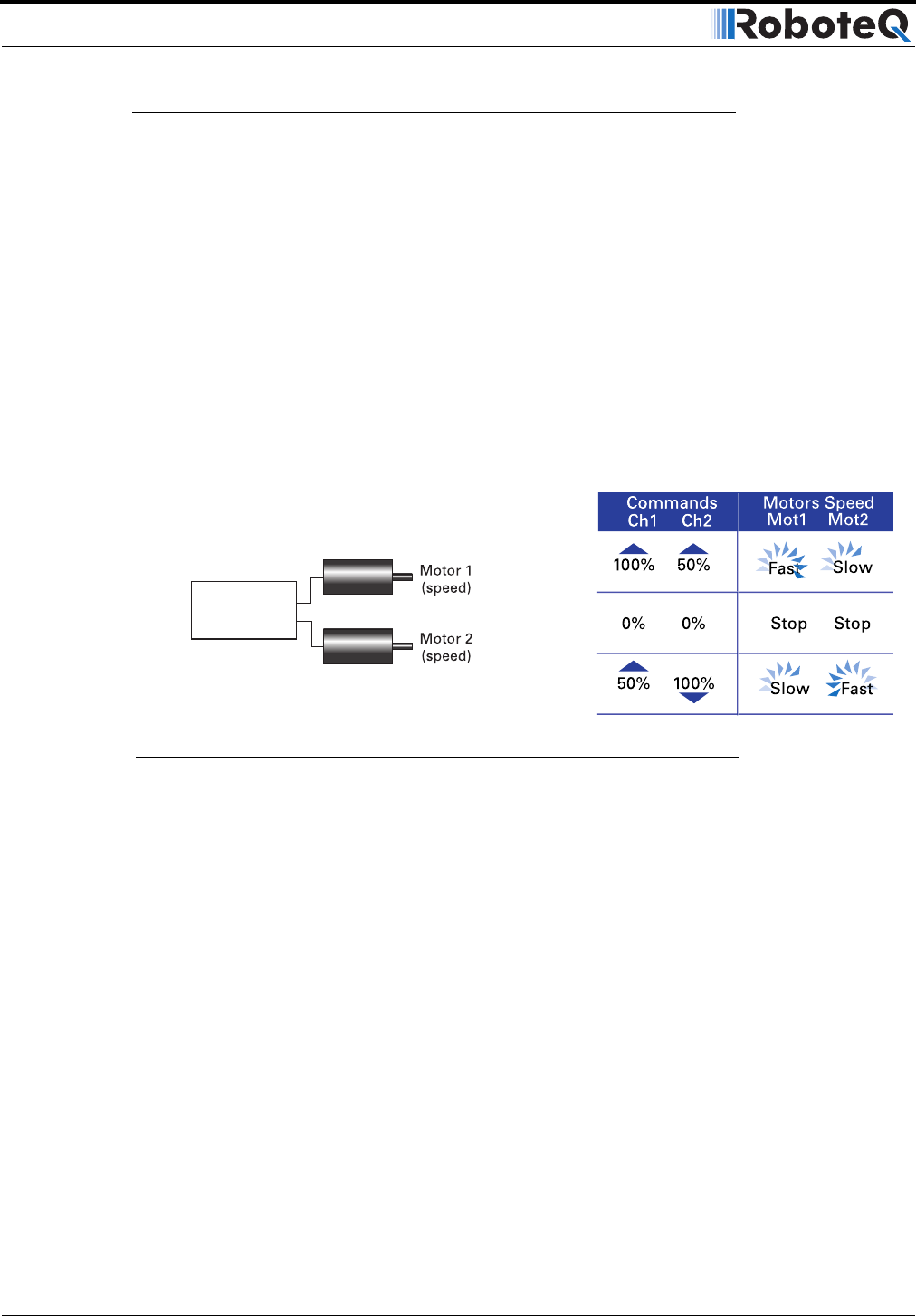
In the separate speed control mode, channel 1 commands affect only motor 1, while chan-
nel 2 commands affect only motor 2. This is illustrated in Figure 13 below.
Open Loop, Mixed Speed Control
This mode has the same open loop characteristics as the previously described mode. How-
ever, the two commands are now mixed to create tank-like steering when one motor is
used on each side of the robot: Channel 1 is used for moving the robot in the forward or
reverse direction. Channel 2 is used for steering and will change the balance of power on
each side to cause the robot to turn.
Figure 14 below illustrates how the mixed mode works.
Controller
FIGURE 13. Examples of effect of commands to motors in separate mode