



















AX1500 Motor Controller User’s Manual 45
Programmable Acceleration
Programmable Acceleration
When changing speed command, the AX1500 will go from the present speed to the
desired one at a user selectable acceleration. This feature is necessary in order to minimize
the surge current and mechanical stress during abrupt speed changes.
This parameter can be changed by using the controller’s front switches or using serial com-
mands. When configuring the controller using the switches (see “Configuring the Control-
ler using the Switches” on page 171), acceleration can be one of 6 available preset values,
from very soft(0) to very quick (6). The AX1500’s factory default value is medium soft (2).
When using the serial port, acceleration can be one of 24 possible values, selectable using
the Roborun utility or entering directly a value in the MCU’s configuration EEPROM.
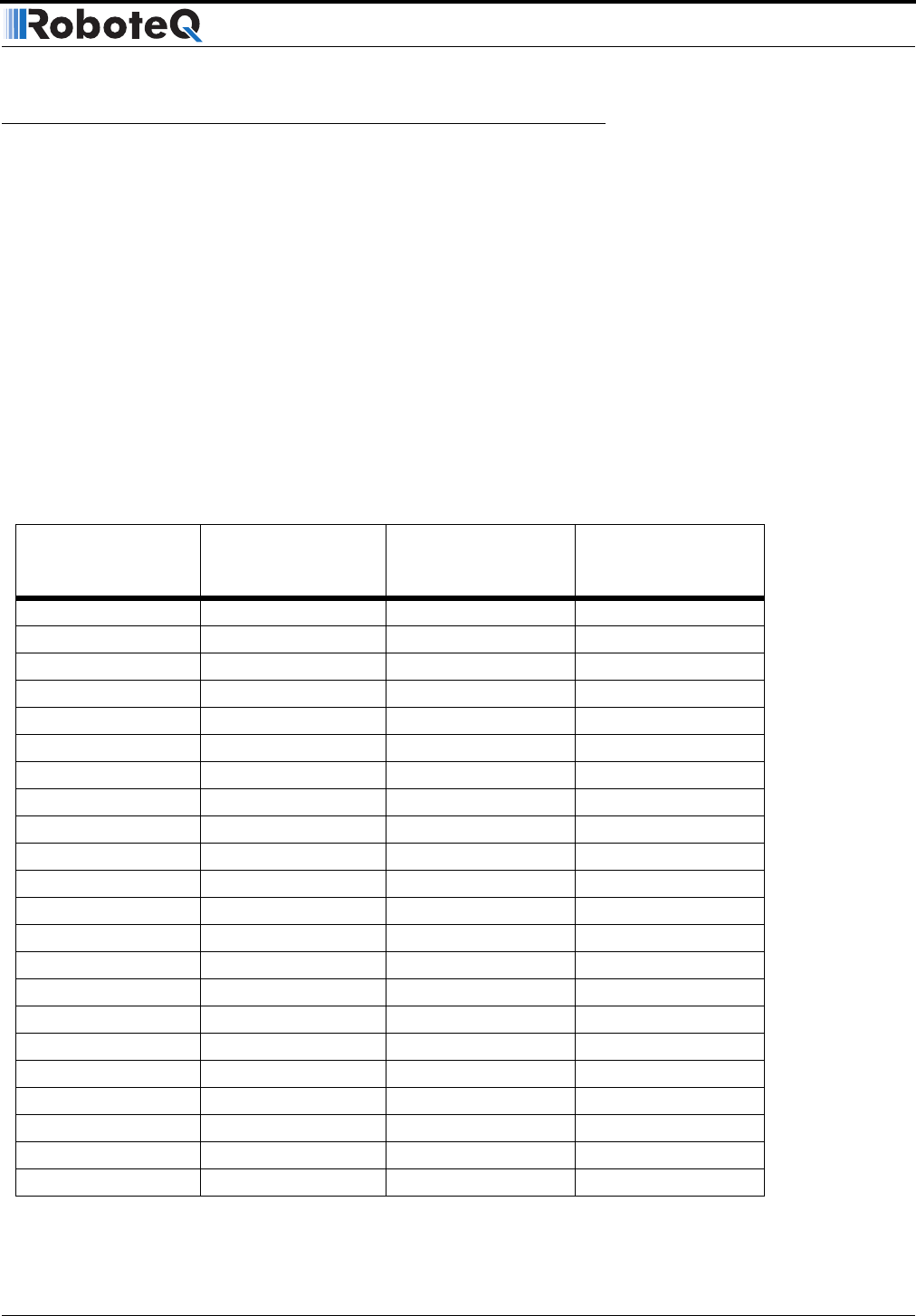
Table 4 shows the corresponding acceleration for all Switch and RS232 settings.
Numerically speaking, each acceleration value corresponds to a fixed percentage speed
increment, applied every 16 milliseconds. The value for each setting is shown in the table
below.
TABLE 4. Acceleration setting table
Acceleration
Setting Using
RS232
Acceleration
Setting Using
Switches
%Acceleration per
16ms
Time from 0 to
max speed
30 Hex 0.78% 2.05 seconds
20 Hex 1.56% 1.02 seconds
10 Hex 2.34% 0.68 second
00 Hex 0 3.13% 0.51 second
31 Hex 3.91% 0.41 second
21 Hex 4.69% 0.34 second
11 Hex 5.47% 0.29 second
01 Hex 1 6.25% 0.26 second
32 Hex - 7.03% 0.23 second
22 Hex - 7.81% 0.20 second
12 Hex - 8.59% 0.19 second
02 Hex 2 (default) 9.38% 0.17 second
33 Hex - 10.16% 0.16 second
23 Hex - 10.94% 0.15 second
13 Hex - 11.72% 0.14 second
03 Hex 3 12.50% 0.128 second
34 Hex - 13.28% 0.120 second
24 Hex - 14.06% 0.113 second
14 Hex - 14.84% 0.107 second
04 Hex 4 15.63% 0.102 second
35 Hex - 16.41% 0.097 second
25 Hex - 17.19% 0.093 second