



















AX1500 Motor Controller User’s Manual 47
Left / Right Tuning Adjustment
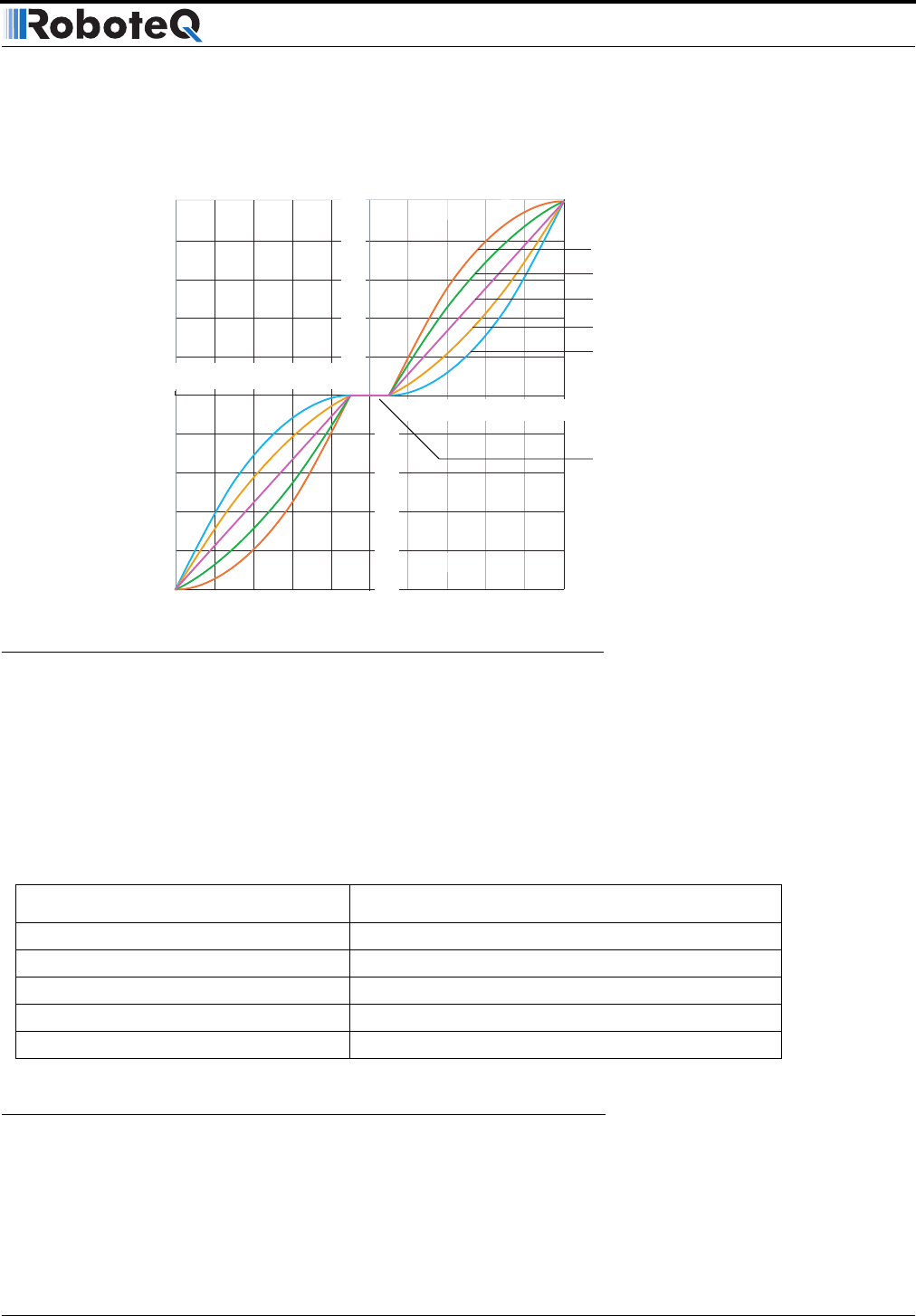
The AX1500 is delivered with the “linear” curves selected for both joystick channels. To
select different curves, the user will need to change the values of “E” (channel 1) and “F”
(channel 2) according to the table below. Refer to the chapter “Configuring the Controller
using the Switches” on page 171 or “Using the Roborun Configuration Utility” on page 161
for instructions on how to program parameters into the controller.
Left / Right Tuning Adjustment
By design, DC motors will run more efficiently in one direction than the other. In most situ-
ations this is not noticeable. In others, however, it can be an inconvenience. When operat-
ing in open loop speed control, the AX1500 can be configured to correct the speed in one
direction versus the other by as much as 10%. Unlike the Joystick center trimming tab that
TABLE 5. Exponent selection table
Exponentiation Parameter Value Selected Curve
E or F = 0 Linear (no exponentiation) - default value
E or F = 1 strong exponential
E or F = 2 normal exponential
E or F = 3 normal logarithmic
E or F = 4 strong logarithmic
20
40
60
80
100
0
20
40
60
80
100
- 20
- 40
- 60
- 80
- 100
20
40
60
80
100
% Forward
(Motor Output)
Logarithmic Strong
Logarithmic Weak
Linear (default)
Exponential Weak
Exponential Strong
% Reverse
% Command Input
Deadband
FIGURE 19. Exponentiation curves