



















Connecting Sensors and Actuators to Input/Outputs
64 AX1500 Motor Controller User’s Manual Version 1.9b. June 1, 2007
These sensors are used to automatically reduce the maximum Amps that the controller
can deliver as it overheats. However, the temperature can be read using the RS232 port
using the ?m query, or during data logging (see “Analog and R/C Modes Data Logging
String Format” on page 156)
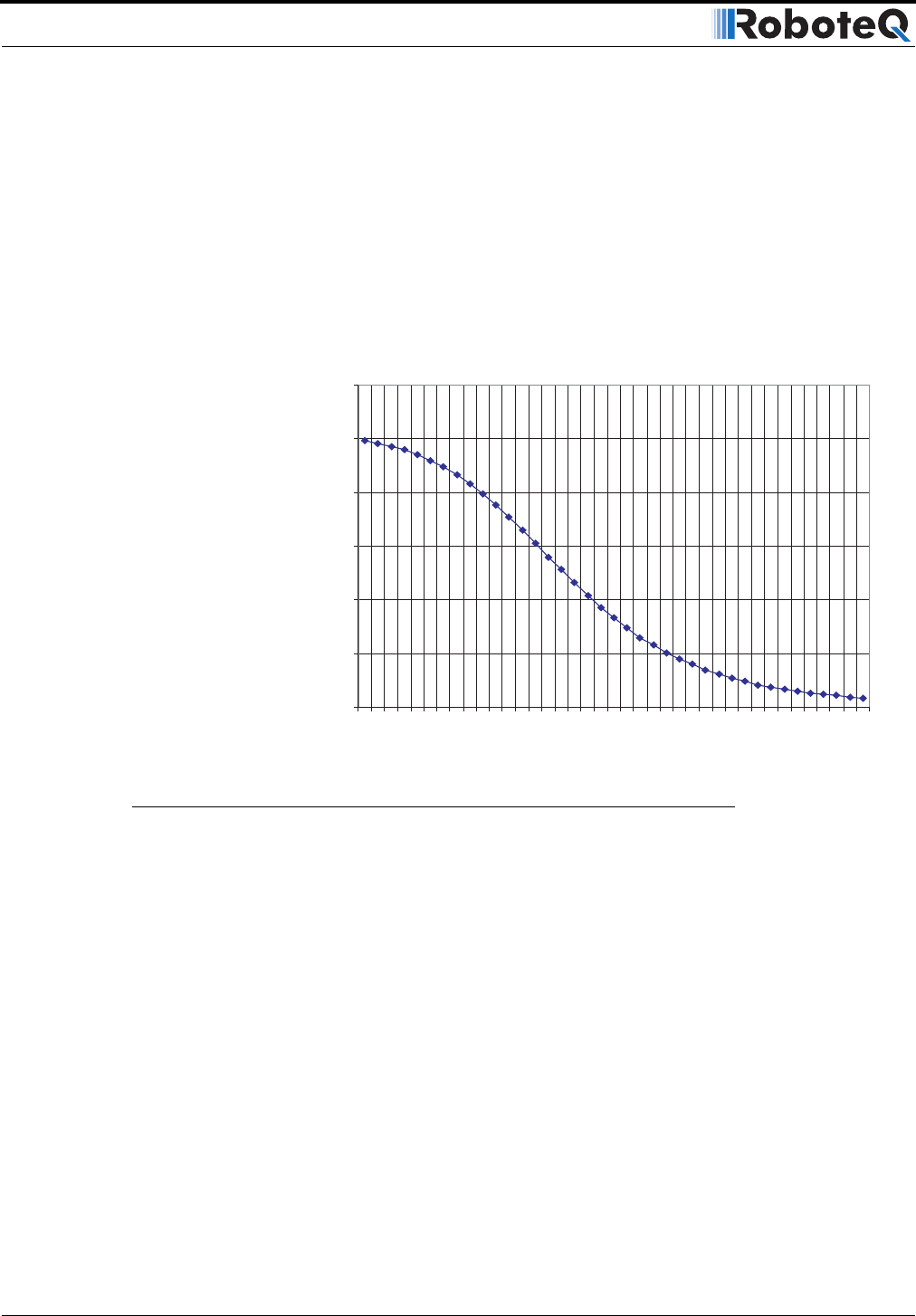
The analog value that is reported will range from 0 (warmest) to 255 (coldest). Because of
the non-linear characteristics of NTC thermistors, the conversion from measured value to
temperature must be done using the correction curve below.
It should be noted that the temperature is measured inside the controller and that it may
be temporarily be different than the temperature measured outside the case.
Temperature Conversion C Source Code
The code below can be used to convert the analog reading into temperature. It is provided
for reference only. Interpolation table is for the internal thermistors.
int ValToHSTemp(int AnaValue)
{
// Interpolation table. Analog readings at -40 to 150 oC, in 5o intervals
int TempTable[39] ={248, 246, 243, 240, 235, 230, 224, 217, 208, 199, 188, 177,
165, 153, 140, 128, 116, 104,93, 83, 74, 65, 58, 51, 45, 40, 35, 31, 27, 24, 21,
19, 17, 15, 13, 12, 11, 9, 8};
int LoTemp, HiTemp, lobound, hibound, temp, i;
i=38;
while (TempTable[i] < AnaValue &&i>0)
i--;
if (i < 0)
i=0;
if (i == 38)
return 150;
0
50
100
150
200
250
300
Reported Analog Value
Temperature in Degrees C
-40
-30
-20
-10
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
FIGURE 34. Analog reading by controller vs. internal heat sink temperature