



















24 www.emersonct.com SM-EZMotion Module User Guide
Figure 34: \Home to Marker Profile (Specified Offset)
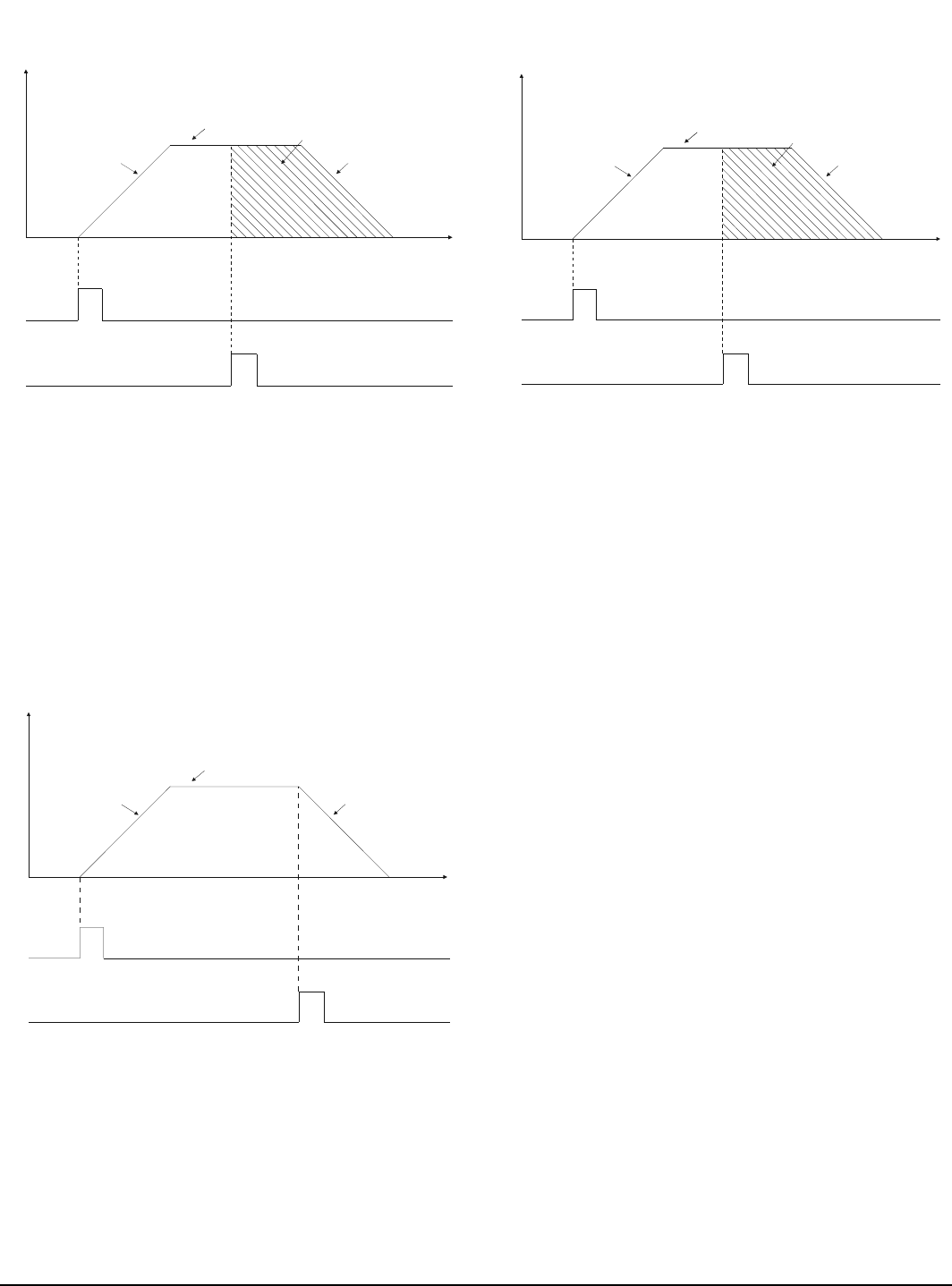
5.3.2 Home to Sensor
The Home to Sensor profile acts much like the Home to
Marker profile, but instead of using the Encoder Marker as
a reference, an external sensor mounted to the machine is
used as the reference. In a Home to Sensor routine, the
motor accelerates to the Home Velocity. The motor
continues at the Home Velocity until the external sensor
activates. Once this sensor activates, the motor
immediately decelerates to a stop, or continues for a
specified offset distance before stopping. Figures 35 and
36 show examples of the Home to Sensor profile, with
calculated offset and specified offset respectively.
Figure 35: Home to Sensor Profile (Calculated Offset)
Figure 36: Home to Sensor Profile (Specified Offset)
5.3.3 Home to Sensor then Marker
The Home to Sensor then Marker profile is a combination
of the two home types described above. Because in many
applications the load will be more than one revolution away
from the desired home position, a Home to Marker cannot
be used because the marker activates once every
revolution of the motor. Therefore, an external sensor is
mounted on the machine to determine the home position.
The SM-EZMotion module allows the user to home first to
the external sensor, followed by a home to the next marker
pulse. The Home to Sensor then Marker combines the
accuracy of homing to the encoder marker with the
flexibility of homing to an external sensor.
The Home to Sensor then Marker routine begins by
accelerating up to the Home Velocity. The motor then
continues at the Home Velocity until the external sensor
activates. After the sensor activates, the motor continues
at the Home Velocity until the next rising edge of the
encoder marker is detected. Once the encoder marker
activates, the motor either begins to decelerate
immediately, or continues for a specified offset distance
before stopping. Figures 37 and 38 show examples of the
Home to Sensor then Marker profile, with calculated offset
and specified offset respectively.
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Initiate
Encoder Marker
Home Offset
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Initiate
External Sensor
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Initiate
External Sensor
Home Offset