



















How Motion Works www.emersonct.com 29
profile are as follows:
Follower Distance Units / Velocity Timescale.
And units of acceleration for a realtime move are
Foll Distance Units / Velocity Timescale / Accel Timescale.
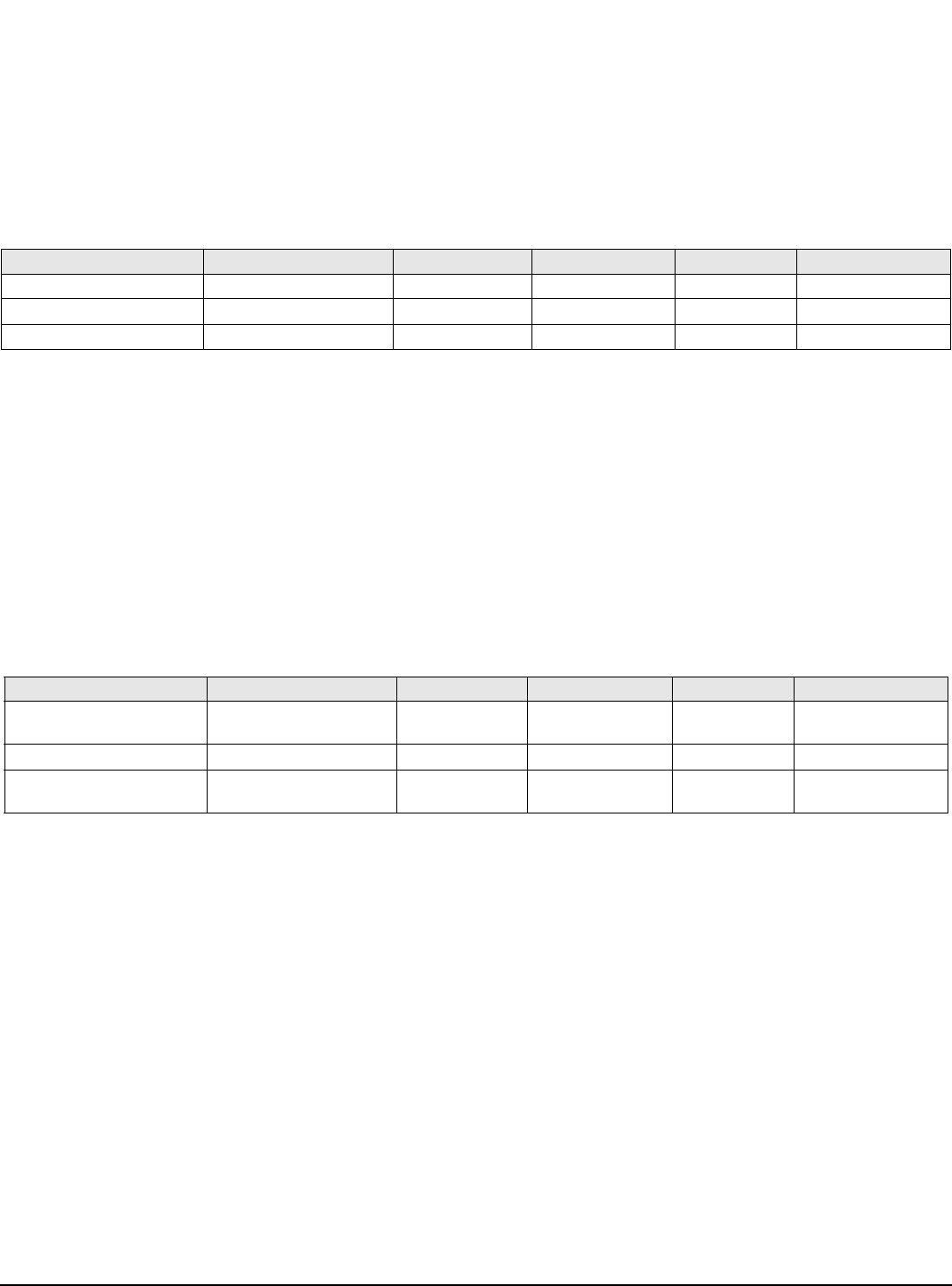
A few examples of these units are as listed below.
Based on these units, we see that velocity and acceleration
of the motor are dependent upon actual time (minutes or
seconds).
Selecting a Timebase of Synchronized means that all units
of velocity and acceleration are a function of Master
Distance rather than time. Therefore, the motor velocity
acceleration and position are all functions of the position
and velocity of the master axis. The units for velocity of a
Synchronized move are as follows:
Follower Distance Units / Master Distance Unit
Therefore, the user specifies the number of follower
distance units that the motor will travel per Master Distance
Unit. If the distance units for master and follower are the
same, then the user in effect specifies a ratio for the
velocity.
The acceleration units for a synchronized move are again
a function of Master Distance. Acceleration and
Deceleration units are as follows:
Follower Distance Units / Master Distance Unit / Master
Distance Unit
A few examples of Synchronized motion units are listed in
the table below.
5.7 Summing Multiple Profiles
Motor motion or "Axis" motion may be generated from
either of two Profiles: Profile.0 and Profile.1. Each of these
Profiles can run any type of motion (i.e. Home, Index, Jog,
Gear) at any time. Both of the Profiles can generate motion
simultaneously. For example while Gearing, an
incremental index can be initiated "on top" of the Gear
velocity using two separate profiles. The distance and
velocity of the two profiles is summed to generate the
overall position command and velocity command for the
motor.
In order to run motion on both Profiles simultaneously, a
program must be used. To specify which profile a motion
object runs on, the On Profile instruction is used. The
default Profile is Profile.0 and therefore it is unnecessary to
specify On Profile.0 in user programs. If no Profile is
specified, the default profile is used.
All motion run from the Assignments screen is
automatically run on Profile 0. It is not possible to change
the Profile on which motion run from the Assignments
screen operates. Therefore, in order to run motion from
both the Assignments screen and from a program
simultaneously, motion initiated by the program must be
run on Profile 1.
Figure XX below shows an example to two separate
profiles (Index 0 and Index 1). Each profile is shown
individually, and then a summed profile diagram is shown
to demonstrate what the overall profile looks like when the
profiles are summed.
Realtime
Follower Distance Units Master Distance Units Vel. Timescale Accel Timescale Velocity Units Accel/Decel Units
Inches N/A Sec Sec Inches/Sec Inches/Sec/Sec
Revs N/A Min Sec Rev/Min Rev/Min/Sec
Degrees N/A Sec msec Degrees/Sec Degrees/sec/msec
Synchronized
Follower Distance Units Master Distance Units Vel. Timescale Accel Timescale Velocity Units Accel/Decel Units
Inches MstrInch N/A N/A Inches/MstrInch
Inches/MstrInch/
MstrInch
Revs MstrRev N/A N/A Revs/MstrRev Revs/MstrRev/MstrRev
Degrees MstrInch N/A N/A Degrees/MstrInch
Degrees/MstrInch/
MstrInch