



















56 www.emersonct.com SM-EZMotion Module User Guide
Jog Name
This is a descriptive character string which can be
assigned to the specific jog. Giving a name to a jog can
make the motion setup easier to follow.
Time Base
This list box allows the user to select the time base for the
individual jog. The options are Realtime and Synchronized.
Jog Velocity
This parameter specifies the target jog velocity for the
individual Jog. The motor will run at this velocity when
jogging with an assignment or through a program. This
value is a signed number. The direction of the jog is
determined by the sign of the jog velocity as well as using
the Jog.PlusInitiate or the Jog.MinusInitiate.
Jog Acceleration
This is the acceleration ramp used when initiating this
individual Jog. If S-Curve ramps are used, then this is the
average acceleration rate for the entire ramp. The units for
the acceleration are setup in the Setup - User Units view in
PowerTools Pro.
Jog Deceleration
This is the deceleration ramp used when stopping this
individual Jog. If S-Curve ramps are used, then this is the
average deceleration rate for the entire ramp. The units for
the deceleration are setup in the Setup - User Units view in
PowerTools Pro.
Jog Sources and Destinations
Sources
Jog.AnyCommandComplete - The
Jog.AnyCommandComplete source will activate when
either Jog0 or Jog1 completes its deceleration ramp, and
reaches zero commanded velocity. It will deactivate when
any Jog is initiated again. If the Stop destination is used
during a Jog, then the Jog.AnyCommandComplete will not
activate.
Jog.#.Accelerating - This source is active while a jog is
accelerating to its target velocity. Once the Jog reaches the
target velocity, the Jog.#.Accelerating source will
deactivate.
Jog.#.AtVel - This source activates when the individual jog
reaches its target velocity. It deactivates when a jog
deceleration ramp begins.
Jog.#.CommandInProgress - The
Jog.#.CommandInProgress source is active throughout an
entire jog profile. The source activates at the beginning of
a jog acceleration ramp, and deactivates at the end of a jog
deceleration ramp.
Jog.#.CommandComplete - The
Jog.#.CommandComplete source will activate when the
specific jog completes its deceleration ramp. It will remain
active until the specific jog is initiated again. If the Stop
destination is used during a Jog, then the
Jog.#.CommandComplete will not activate.
Jog.#.Decelerating - This source is active while a jog is
decelerating from its target velocity. Once the Jog reaches
zero velocity (or its new target velocity), the
Jog.#.Decelerating source will deactivate.
Destinations
The following destination functions can be found in the
Assignments view under the I/O setup group:
Jog.PlusActivate
When this destination is activated, jogging motion will
begin in the positive direction. The jog velocity is
determined by which jog (Jog0 or Jog1) is active or not. A
jog stops when this destination is deactivated. If the jog
velocity is negative, Jog.PlusActivate will cause the motor
to jog in the negative direction.
Jog.MinusActivate
When this destination is activated, jogging motion will
begin in the negative direction. The jog velocity is
determined by which jog (Jog0 or Jog1) is active or not. A
jog stops when this destination is deactivated. If the jog
velocity is negative, Jog.MinusActivate will cause the
motor to jog in the positive direction.
Jog.Select0
This destination is used to select between Jog0 and Jog1.
When the Jog.Select0 destination is not active, the target
velocity for the jog is the Jog.0.Velocity. If the Jog.Select0
destination is active, the target velocity of the jog is the
Jog.1.Velocity. Jog.Select0 can be toggled "On" or "Off"
while jogging. Jog acceleration and deceleration ramps are
used to ramp between jog velocities.
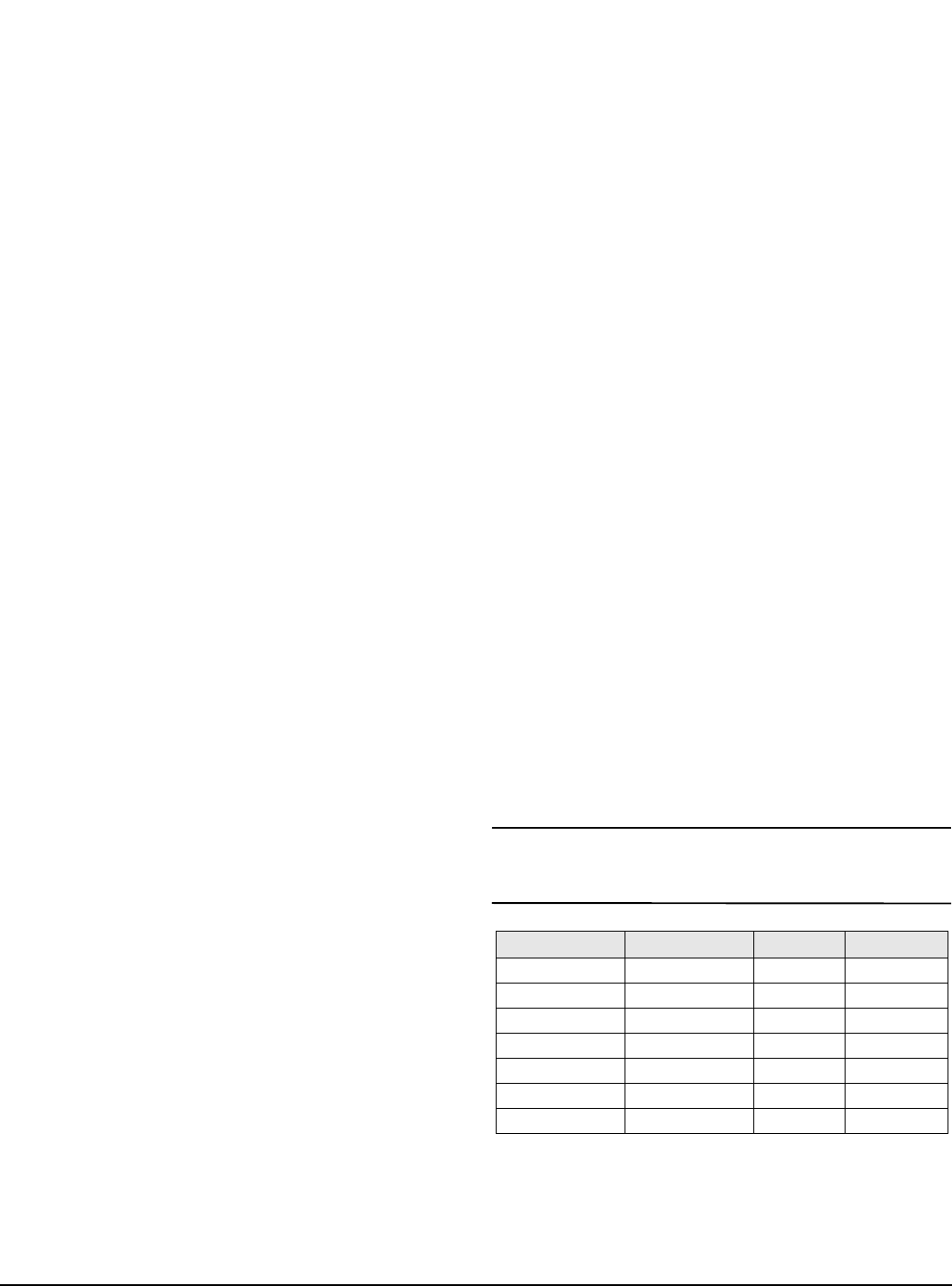
Below is a description of jog operation using these
destinations.
Note
In the table below Jog.0.Velocity = 100 RPM and
Jog.1.Velocity = -500 RPM.
All Jog destinations are level sensitive.
Jog.PlusActivate Jog.MinusActivate Jog.Select0 Motion
Off Off Off 0 RPM
On Off Off +100 RPM
Off On Off -100 RPM
On Off On -500 RPM
Off On On +500 RPM
On On Off 0 RPM
On On On 0 RPM