



















How Motion Works www.emersonct.com 25
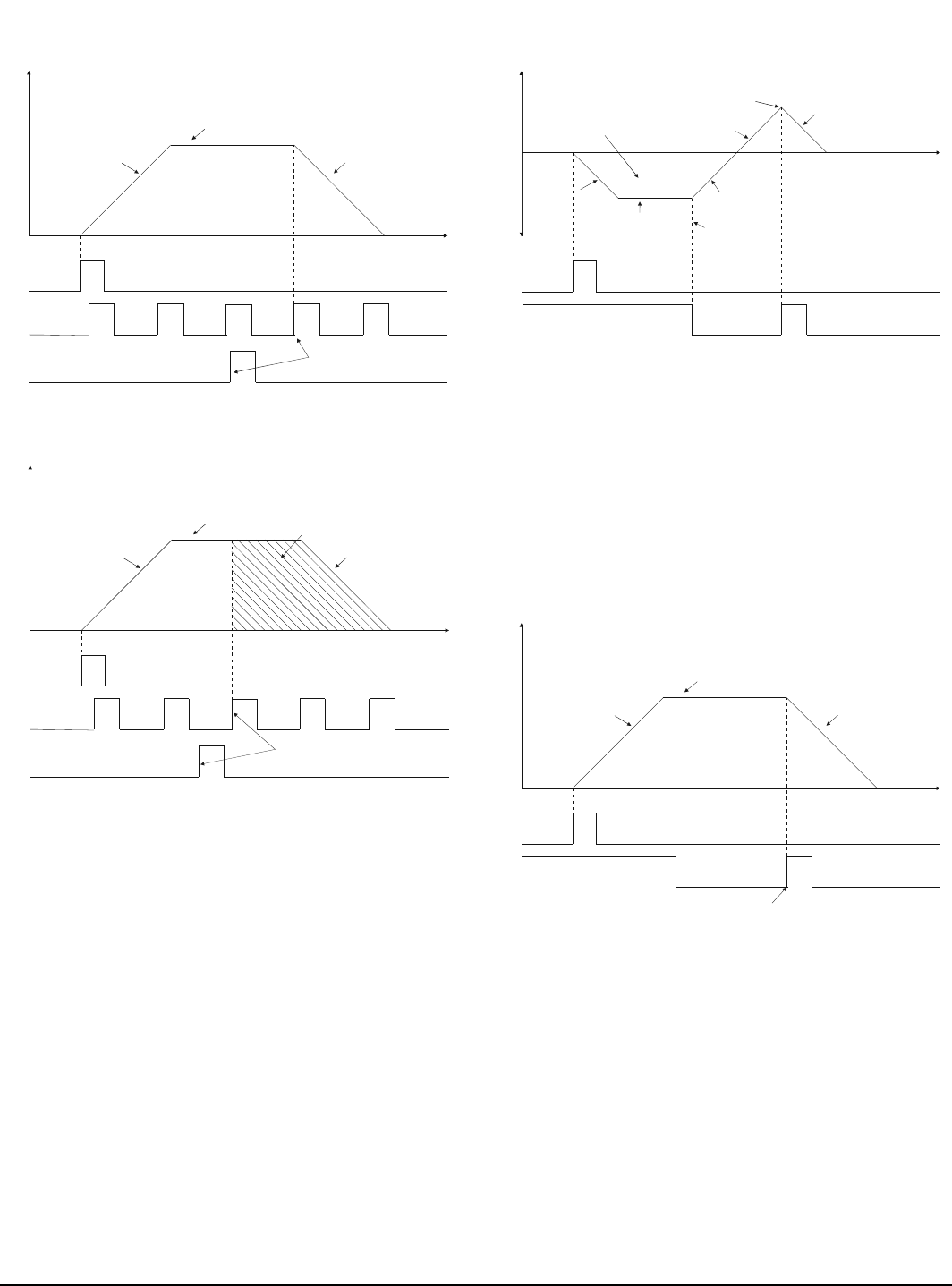
Figure 37: Home to Sensor then Marker Profile
(Calculated Offset)
Figure 38: Home to Sensor then Marker Profile
Specified Offset)
5.3.4 If On Sensor Options
In a Home to Sensor, or Home to Sensor then Marker
profile special conditions must be created to handle the
situation when the External Sensor is already active when
Home is initiated. Different users want the system to act
differently in this condition, so the SM-EZMotion module
has pre-programmed solutions for this condition. The two
options are explained below.
5.3.4.1 Back Off Before Homing
If the Home Sensor is active when home is initiated, one
option is to move the motor in the direction opposite from
the programmed direction until the home sensor
deactivates, and then again in the positive direction until
the home sensor activates. Figure 39 shows the Home to
Sensor profile when the Home Sensor is active when the
home is initiated and Back Off Before Homing is selected.
Figure 39: Home to Sensor (Back Off Before Homing)
5.3.4.2 Go Forward To Next Sensor
On some machines, motion in a certain direction may be
prohibited due to mechanical design. In this case, the Back
Off Before Homing option may not be practical. In this
case, if the Home Sensor is active when the Home is
initiated, the motor continues in the programmed direction
until the next "Rising Edge" of the external home sensor is
detected. Figure 40 shows the Home to Sensor profile
when the Home Sensor is active when home is initiated
and Go Forward To Next Sensor is selected.
Figure 40: Home to Sensor (Go Forward To Next
Sensor)
5.4 Index
An Index profile is used to move the motor a precise
distance or to a specific position. There are many different
applications that can be solved using different
combinations of Index types. The five major types of
Indexes are Absolute, Incremental, Registration, Rotary
Plus, and Rotary Minus. Each of these Index types are
described in detail below.
5.4.1 Absolute Index
An Absolute Index is used to move the motor to a specific
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Initiate
Encoder Marker
External Sensor
External Sensor Activates wait
for next Encoder Marker
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Offset
Home Initiate
Encoder Marker
External Sensor
External Sensor Activates wait
for next Encoder Marker
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Accel
Home Initiate
External Home Sensor
Home Decel
Home Velocity
External Home
Sensor Clears
+
-
Home Sensor is active when
Home is initiated, so motor
travels in negative direction
Velocity
Home Accel
Home Velocity
Home Decel
Time
Home Initiate
External Home Sensor
First risin
g
ed
g
e is used as Home reference