



















Connecting to PLCs and Other Devices
Operations
and Monitoring
4–10
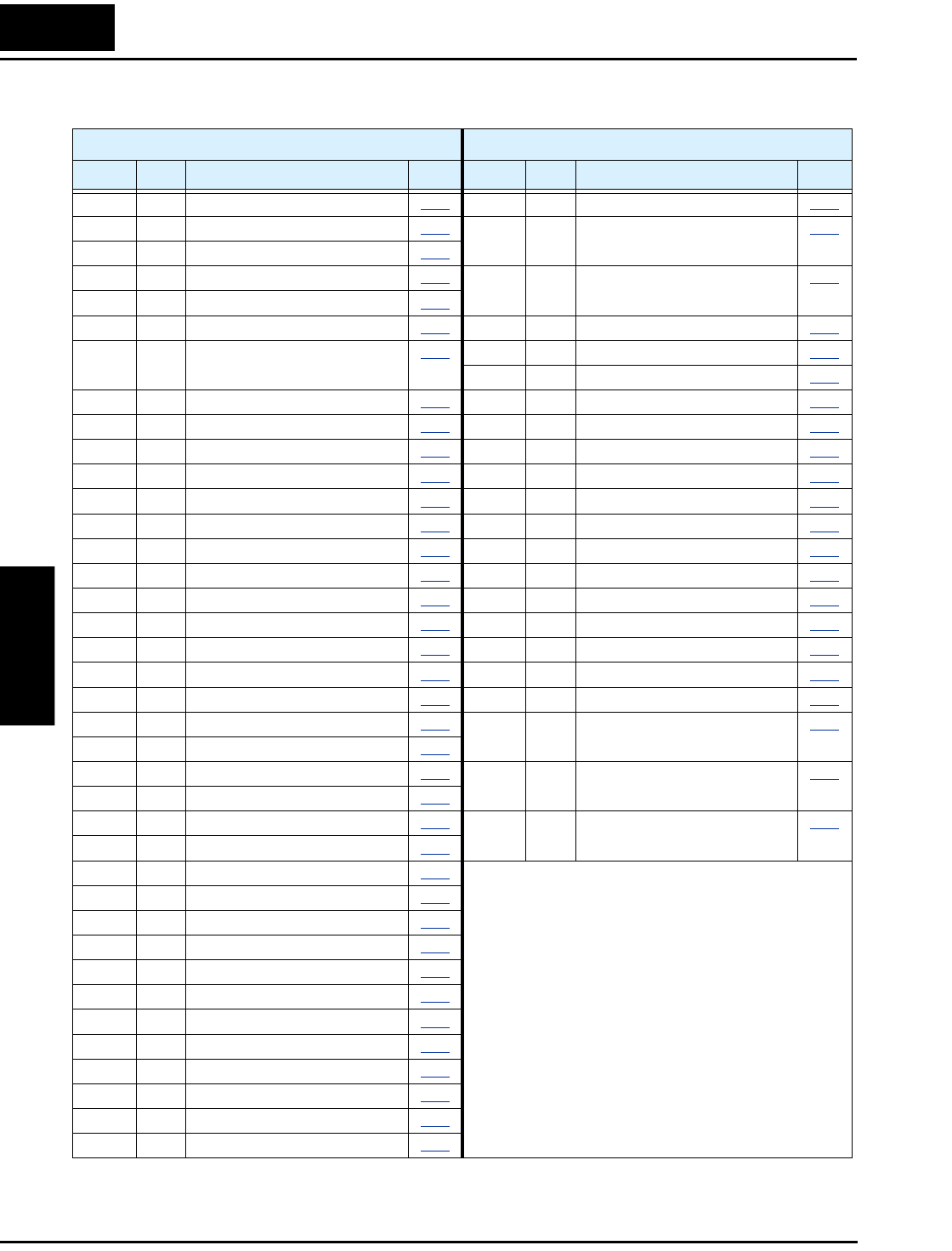
Terminal Listing Use the following table to locate pages for intelligent input and output material in this chapter.
Intelligent INPUTS Intelligent OUTPUTS
Symbol Code Name Page Symbol Code Name Page
RV 01 Reverse Run/Stop 4–12
RUN 00 Run signal 4–43
CF1 02 Multi-speed select, Bit 0 (LSB) 4–13 FA1 01 Freq. arrival type 1 –
constant speed
4–44
CF2 03 Multi-speed select, Bit 1 4–13
CF3 04 Multi-speed select, Bit 2 4–13 FA2 02 Freq. arrival type 2 –
over-frequency
4–44
CF4 05 Multi-speed select, Bit 3 (LSB) 4–13
JG 06 Jogging 4–16 OL 03 Overload advance notice signal 4–46
DB 07 External signal for DC injection
braking
4–17 OD 04 Output deviation for PID control 4–47
AL 05 Alarm signal 4–48
SET 08 Set (select) second motor data 4–18 FA3 06 Freq. arrival type 3 – at freq. 4–44
2CH 09 2-stage accel and decel 4–19 OTQ 07 Over-torque signal 4–50
FRS 11 Free-run stop 4–20 IP 08 Instantaneous power failure signal 4–51
EXT 12 External trip 4–21 UV 09 Under-voltage signal 4–51
USP 13 Unattended start protection 4–22 TRQ 10 In torque limit signal 4–54
CS 14 Commercial power source 4–23 RNT 11 Run time over 4–54
SFT 15 Software lock 4–25 ONT 12 Power-ON time over 4–54
AT 16 Analog input voltage/current sel. 4–26 THM 13 Thermal alarm signal 4–55
SET3 17 Set (select) 3rd motor data 4–18 BRK 19 Brake release signal 4–58
RS 18 Reset inverter 4–27 BER 20 Brake error signal 4–58
STA 20 Start (3-wire interface) 4–29 ZS 21 Zero speed detect 4–58
STP 21 Stop (3-wire interface) 4–29 DSE 22 Speed deviation maximum 4–58
F/R 22 FW, RV (3-wire interface) 4–29 POK 23 Positioning completion 4–58
PID 23 PID ON/OFF 4–30 FA4 24 Freq. arrival type 4 –
over-frequency (2)
4–44
PIDC 24 PID Reset 4–30
CAS 26 Control gain setting 4–31 FA5 25 Freq. arrival type 5 –
at frequency (2)
4–44
UP 27 Remote control Up func. 4–33
DWN 28 Remote control Down func. 4–33 OL2 26 Overload advance notice
signal (2)
4–46
UDC 29 Remote control data clearing 4–33
OPE 31 Operator control 4–34
SF1–7 32–38 Multi-speed bits 1 to 7 4–13
OLR 39 Overload restriction 4–35
TL 40 Torque limit enable 4–37
TRQ1 41 Torque limit select, bit 1 (LSB) 4–37
TRQ2 42 Torque limit select, bit 2 (MSB) 4–37
PPI 43 P / PI mode selection 4–31
BOK 44 Brake confirmation signal 4–39
ORT 45 Orientation (home search) 4–41
LAC 46 LAC: LAD cancel 4–41
PCLR 47 Position deviation reset 4–41
STAT 48 Pulse train position cmd enable 4–41