



















SJ300 Inverter
Operations
and Monitoring
4–37
Torque Limit The Torque Limit function limits the motor output torque for sensorless vector control, sensor-
less vector control 0Hz domain, or vector control with feedback.
In the torque limit function, the following operational modes are available (selected by B040):
1. Four-quadrant individual setting mode – This mode sets torque limit in 4 zones, forward
driving and regenerating, reverse driving and regenerating. Limits for each quadrant are set
with B041 – B044 individually.
2. Terminal selection mode – By use of torque limit select intelligent input terminals 1 and 2,
this mode changes and uses torque limits 1 – 4 set in B041 – B044. Selected torque limit
range is valid in all four quadrants.
3. Analog input mode – This mode sets torque limit value by the voltage applied to terminal
[O2] (referenced to [L] for ground. An input of 0 – 10V corresponds to the torque limit
value of 0 to 200%. The selected torque limit value is valid in all four quadrants (whether
forward or reverse move, driving or regenerating).
4. Expansion Cards 1 and 2 – This function is valid when using the expansion card (SJ-DG).
Please refer to the SJ-DG instruction manual.
When the torque limit enable function [TL] is assigned to an intelligent input terminal, torque
limiting occurs only when [TL] is ON. When the [TL] input is OFF, the inverter always uses the
default torque control limit of 200% maximum. That torque limit value corresponds to 200% of
the maximum inverter output current. Therefore, the output torque also depends on the particu-
lar motor in use. When the over-torque output [OTQ] is assigned in the intelligent output selec-
tion, it turns ON when the inverter is performing torque limiting.
Note 1: Unavailable for A344
Note 2: Unavailable for A244 and A344
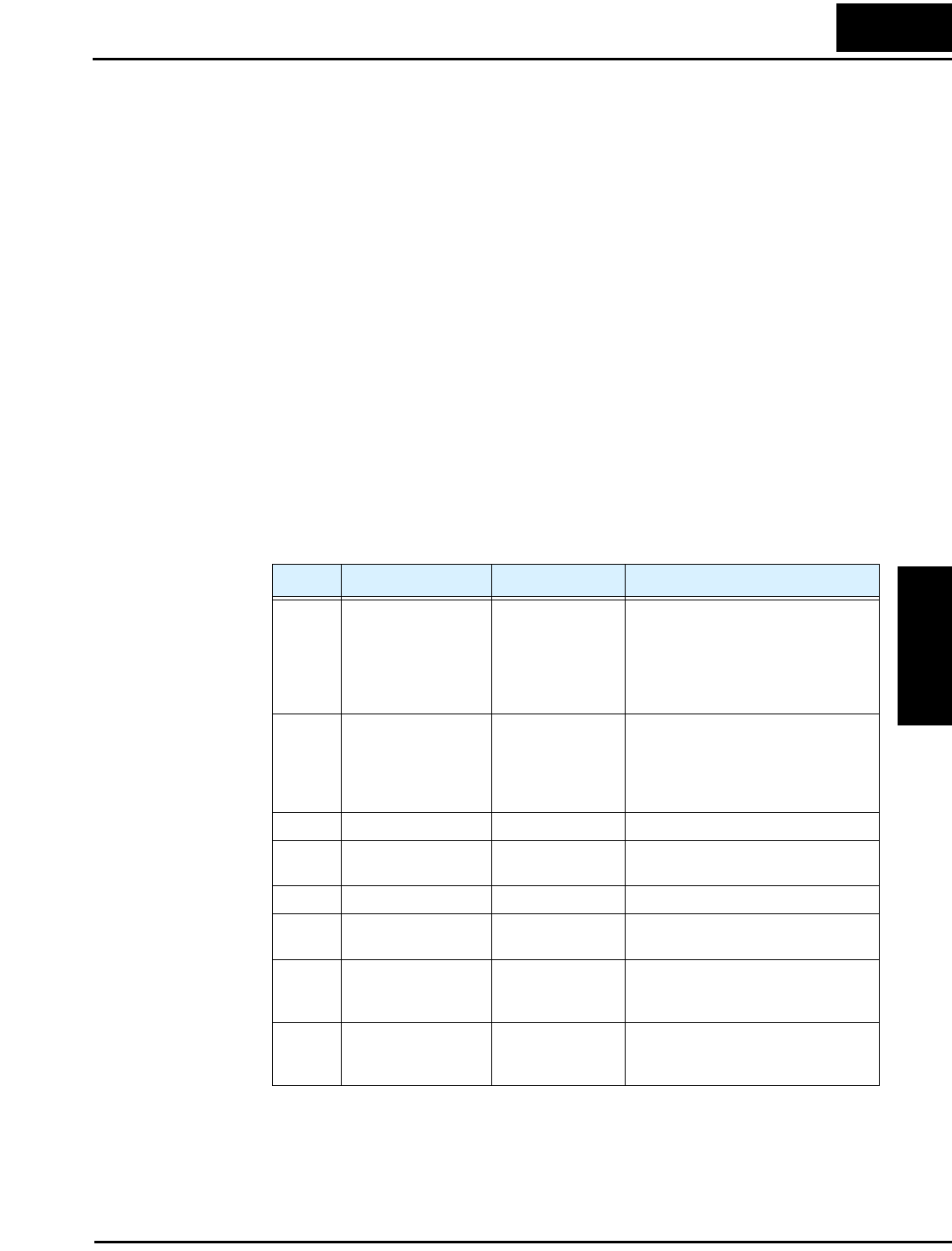
Code Function Data or Range Description
A044 /
A244
Control method
selection
00
01
02
03
04
05
V/f Constant torque
V/f Variable torque
V/f Free-setting torque *1
Sensorless vector *1
Sensorless vector, 0 Hz domain *1
Vector control with sensor *2
B040
Torque limit
selection
00
01
02
03
04
4-quadrant individual setting
Terminal selection
Analog [O2] input
Expansion card 1
Expansion card 2
B041 Torque limit 1 0 to 200% Forward-driving in 4-quadrant mode
B042 Torque limit 2 0 to 200% Reverse-regenerating in 4-quadrant
mode
B043 Torque limit 3 0 to 200% Reverse-driving in 4-quadrant mode
B044 Torque limit 4 0 to 200% Forward-regenerating in 4-quadrant
mode
C001
to
C008
Intelligent input
terminal [1] to [8]
function
40
41
42
Torque limit enable
Torque limit selection, bit 1 (LSB)
Torque limit selection, bit 2 (MSB)
C021
to
C025
Intelligent output
terminal [11] to [15]
function
10 In torque limit