



















Using Intelligent Input Terminals
Operations
and Monitoring
4–32
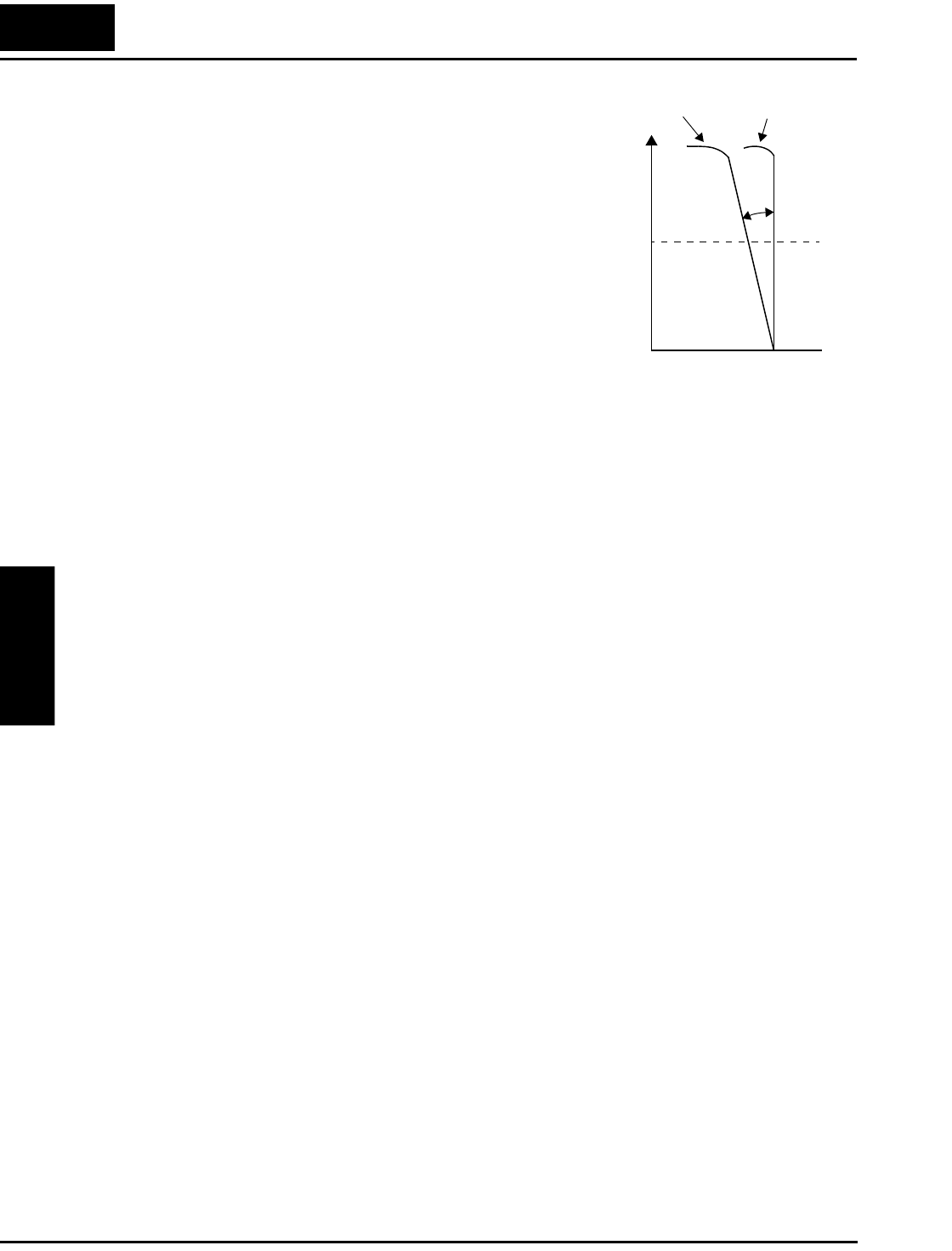
The speed control mode is normally proportional-
integral compensation (PI), which attempts to
keep the deviation between the actual speed and
speed command equal to zero. You can also select
proportional (P) control function, which can be
used for droop control (i.e. several inverters
driving one load). Droop is the speed difference
resulting from P control versus PI control at 100%
output torque as shown in the graph. Set the P/PI
switching function (option 43) to one of the intel-
ligent input terminals [1] to [8]. When the P/PI
input terminal is ON, the control mode becomes
proportional control (P). When the P/PI input
terminal is OFF, the control mode becomes
proportional-integral control.
The proportional gain Kpp value determines the
droop. Set the desired value using parameter
H052. The relationship between the Kpp value and the droop is shown below:
The relationship between the droop and the rated rotation speed is shown below:
0
Speed of rotation
Torque
P Control
Droop
100%
PI Control
Droop
10
(Kpp Set Value)
--------------------------------
%()=
Droop
Speed error at rated torque
Synchronous speed base frequency
----------------------------------------------------------------------
=