



















SJ300 Inverter
Operations
and Monitoring
4–65
Setting Motor Constants for Vector Control
Introduction These advanced torque control algorithms improve performance, particularly at low speeds:
• Sensorless Vector Control – improved torque control at output frequencies down to 0.5 Hz.
Use A044=03 (1st motor) or A244=03 (2nd motor) to select sensorless vector control.
• Sensorless Vector Control, 0Hz Domain – improved torque control at output frequencies
from 0 to 2.5 Hz. Use A044=04 (1st motor) or A244=04 (2nd motor) to select sensorless
vector control, 0Hz domain.
• Vector Control with Feedback – improved torque control at all speeds, while providing the
most accurate speed regulation of all torque control algorithms. Use A044=05 to select
vector control with feedback.
These three control algorithms require the inverter’s motor constants to accurately match the
characteristics of the particular motor connected to your inverter. Simply using the inverter’s
default parameters with the vector control modes may not produce satisfactory results. The
auto-tuning procedure described later in this section is recommended for most applications
needing vector control. It determines and records the characteristics of the attached motor.
However, it is possible to enter the motor constants directly if the motor manufacturer has
provided that data.
After performing an initial auto-tuning procedure for your motor, you have an additional
option: adaptive tuning. The adaptive tuning parameters use the auto-tuning procedure’s results
as starting values. Then, each time the motor runs normally in your application, the inverter
tunes the parameters again to match the motor. This compensates for temperature changes, etc.,
further optimizing the values.
The following table lists the parameters associated with motor constant settings. Function H002
selects the set of motor constants that you want the inverter to use in normal use. Standard
constants (select with H002=00) include H020 to H024. Auto-tuned constants (select with
H002=01) include H030 to H034. Remember that you have to do the auto-tuning procedure in
this section before using either auto-tuned constants or the adaptive mode (H002=02).
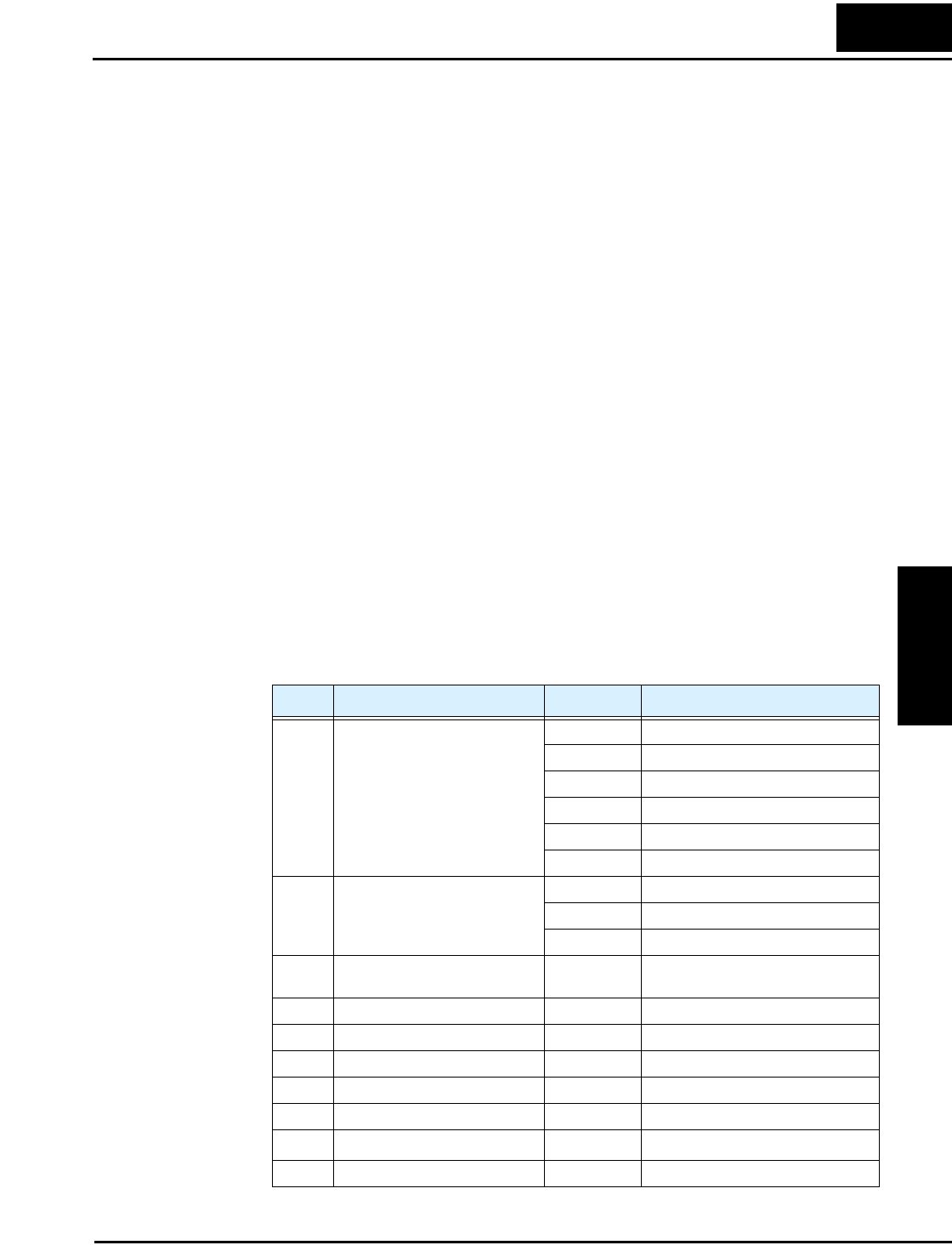
Func. Name Data Notes
A044 /
A244 /
A344
V/f characteristic curve selection,
1st / 2nd / 3rd motors
00 V/f constant torque
01 V/f variable torque
02 V/f free-setting curve
03 Sensorless vector control (SLV)
04 Sensorless vector control, 0Hz domain
05 Vector control with encoder feedback
H002 Motor data selection, 1st motor 00 Standard motor parameters
01 Auto-tuning parameters
02 Adaptive tuning parameters
H003
Motor capacity, 1st motor 0.2 – 75,
0.2 – 160
kW, up to –550xxx models
kW, –750xxx to –1500xxx models
H004 Motor poles setting, 1st motor 2 / 4 / 6 / 8 Units: poles
H020 Motor constant R1, 1st motor 0.000–65.53 Units: ohms
H021 Motor constant R2, 1st motor 0.000–65.53 Units: ohms
H022 Motor constant L, 1st motor 0.00–655.3 Units: mH
H023 Motor constant Io, 1st motor 0.00–655.3 Units: A
H024
Motor constant J, 1st motor 0.001–9999
Units: kgm
2
H030 Auto-tuned constant R1, 1st motor 0.000–65.53 Units: ohms