



















SJ300 Inverter
Operations
and Monitoring
4–31
Internal Speed
Loop Gain
Settings
When sensorless vector control, 0Hz sensorless vector control, or vector control with sensor is
selected for the control method, the Control Gain Switching function selects between two sets
of gains in the internal speed loop. These gains are used in proportional and integral compensa-
tion. Use option code 26 to assign the [CAS] function to an intelligent input terminal. Use
option code 43 to select between P and PI control.
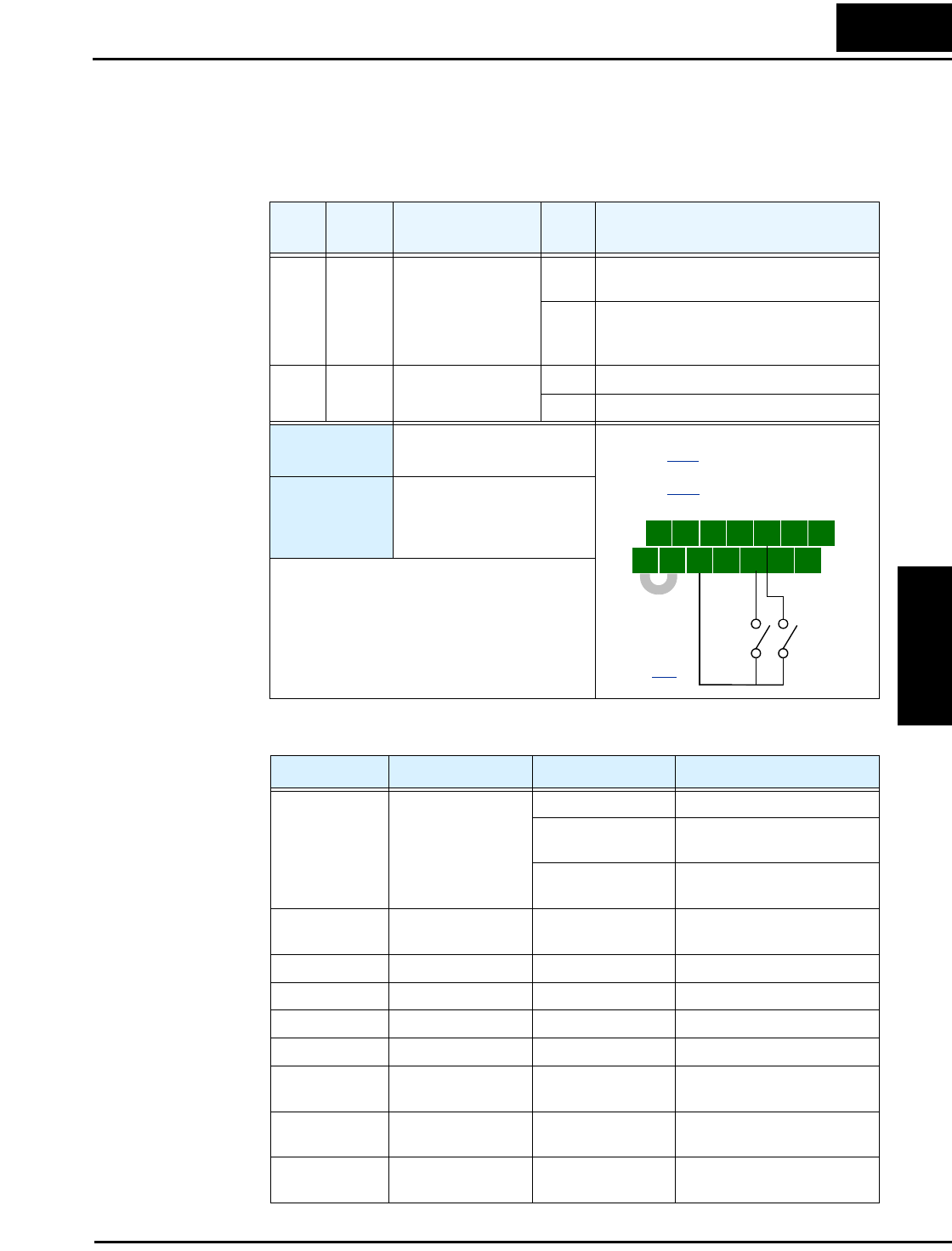
The table below lists the functions and parameter settings related to internal speed loop gains.
Opt.
Code
Symbol Function Name
Input
State
Description
26 CAS Control Gain
Switching
ON Gains in parameters H070, H071, and
H072 are selected
OFF Gains in parameters H050, H051, H052;
or, H250, H251, H252 (2nd motor) are
selected
43 PPI P / PI Control
Switching
ON Selects Proportional control (P)
OFF Selects Proportional-Integral control (PI)
Valid for
inputs:
C001, C002, C003, C004,
C005, C006, C007, C008
Required
settings:
A044 / A244 / A344 =
03 (SLV), or
04 (0 Hz domain), or
05 (V2)
Notes:
• When Control Gain Switching is not selected
for an intelligent input terminal, the default
gains in effect correspond to the OFF state of
[CAS].
Function Code Parameter Setting Range Description
A044 / A244 /
A344
Control method
selection
03 SLV (does not use A344)
04 0-Hz Domain SLV (does not
use A344)
05 V2 (does not use A244 or
A344)
C001 - C008 Intelligent input
selection
43 PPI : P/I switching
H005 / H205 Speed response 0.001 to 65.53 No dimension
H050 / H250 PI proportional gain 0.0 to 999.9/1000 % gain
H051 / H251 PI integral gain 0.0 to 999.9/1000 % gain
H052 / H252 P proportional gain 0.01 to 10.00 No dimension
H070 PI proportional gain
for switching
0.0 to 999.9/1000 % gain
H071 PI integral gain for
switching
0.0 to 999.9/1000 % gain
H072 P proportional gain
for switching
0.0 to 10.0 No dimension
5 3 1
7 6 4 2
8
FW
TH
PLC
CM1
P24
CM1
See I/O
specs on
page 4–9
.
Example: (Requires input configuration—
see page 3–47
. Jumper position shown is
for –xFU/-xFR models; for –xFE models,
see page 4–12
.)
PPI
CAS