

















10 - 6
10. TROUBLESHOOTING
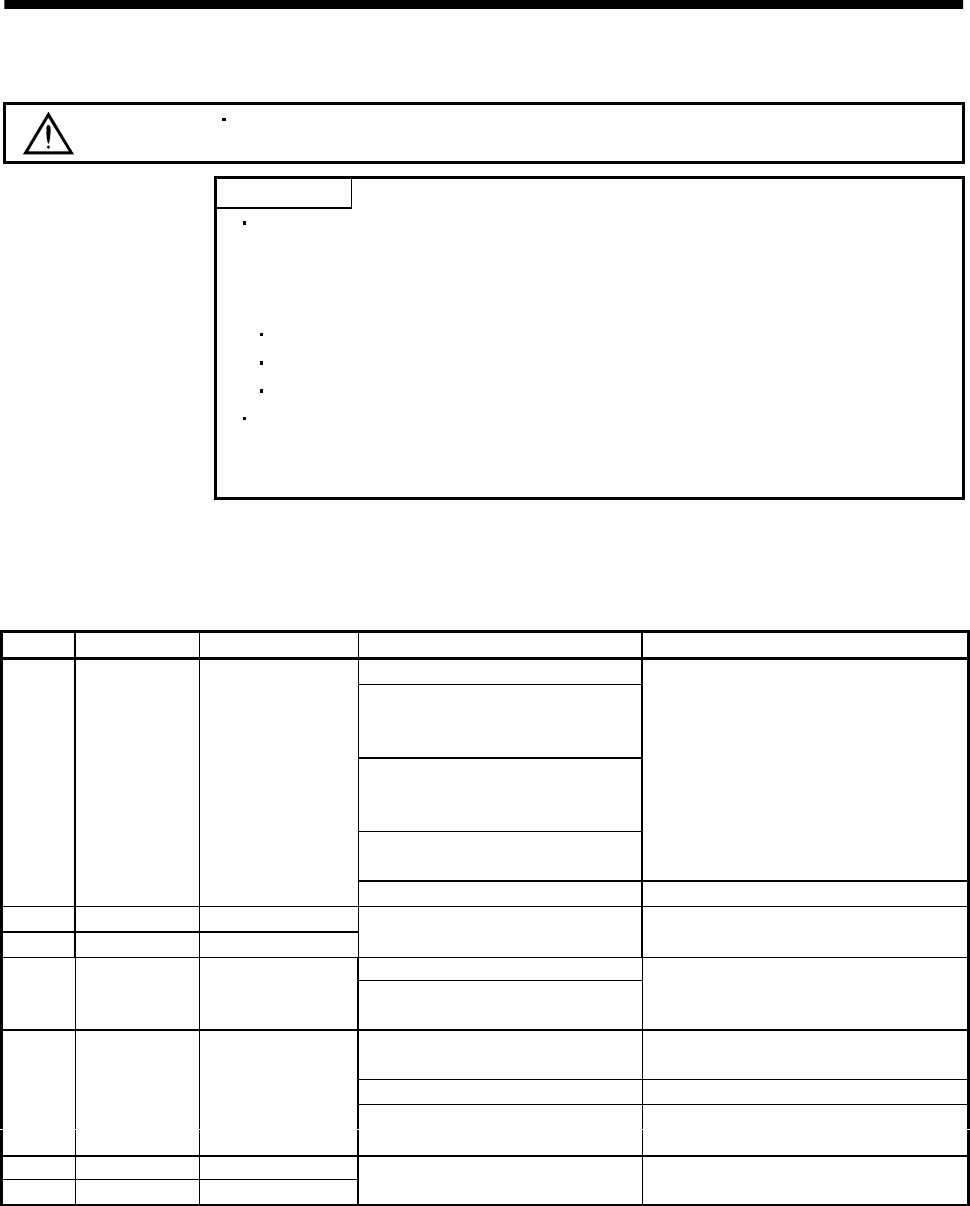
10.2.2 Remedies for alarms
CAUTION
When any alarm has occurred, eliminate its cause, ensure safety, then reset the
alarm, and restart operation. Otherwise, injury may occur.
POINT
When any of the following alarms has occurred, always remove its cause
and allow about 30 minutes for cooling before resuming operation. If
operation is resumed by switching power off, then on to reset the alarm, the
servo amplifier and servo motor may become faulty.
Regenerative error (AL.30)
Overload 1 (AL.50)
Overload 2 (AL.51)
The alarm can be deactivated by switching power off, then on press the
"SET" button on the current alarm screen or by turning on the reset signal
(RES). For details, refer to Section 10.2.1.
When an alarm occurs, the trouble signal (ALM) switches off and the dynamic brake is operated to stop
the servomotor. At this time, the display indicates the alarm No.
The servo motor comes to a stop. Remove the cause of the alarm in accordance with this section. The
optional servo configuration software may be used to refer to the cause.
Display Name Definition Cause Action
1. Power supply voltage is low.
2. There was an instantaneous
control power failure of 60ms or
longer.
3. Shortage of power supply capacity
caused the power supply voltage to
drop at start, etc.
4. Power was restored after the bus
voltage had dropped to 200VDC.
Review the power supply.
AL.10 Undervoltage Power supply
voltage dropped to
160VAC or less.
5. Faulty parts in the servo amplifier Change the servo amplifier.
AL.12 Memory error 1 RAM, memory fault
AL.13 Clock error Printed board fault
Faulty parts in the servo amplifier
Change the servo amplifier.
1. Faulty parts in the servo amplifier
AL.15 Memory error 2 EEP-ROM fault
2. The number of write times to EEP-
ROM exceeded 100,000.
Change the servo amplifier.
1. Encoder connector (CN2)
disconnected.
Connect correctly.
2. Encoder fault Change the servo motor.
AL.16 Encoder error 1 Communication
error occurred
between encoder
and servo amplifier.
3. Encoder cable faulty
(Wire breakage or shorted)
Repair or change cable.
AL.17 Board error CPU/parts fault
AL.19 Memory error 3 ROM memory fault
Faulty parts in the servo amplifier
Change the servo amplifier.