



















14 - 31
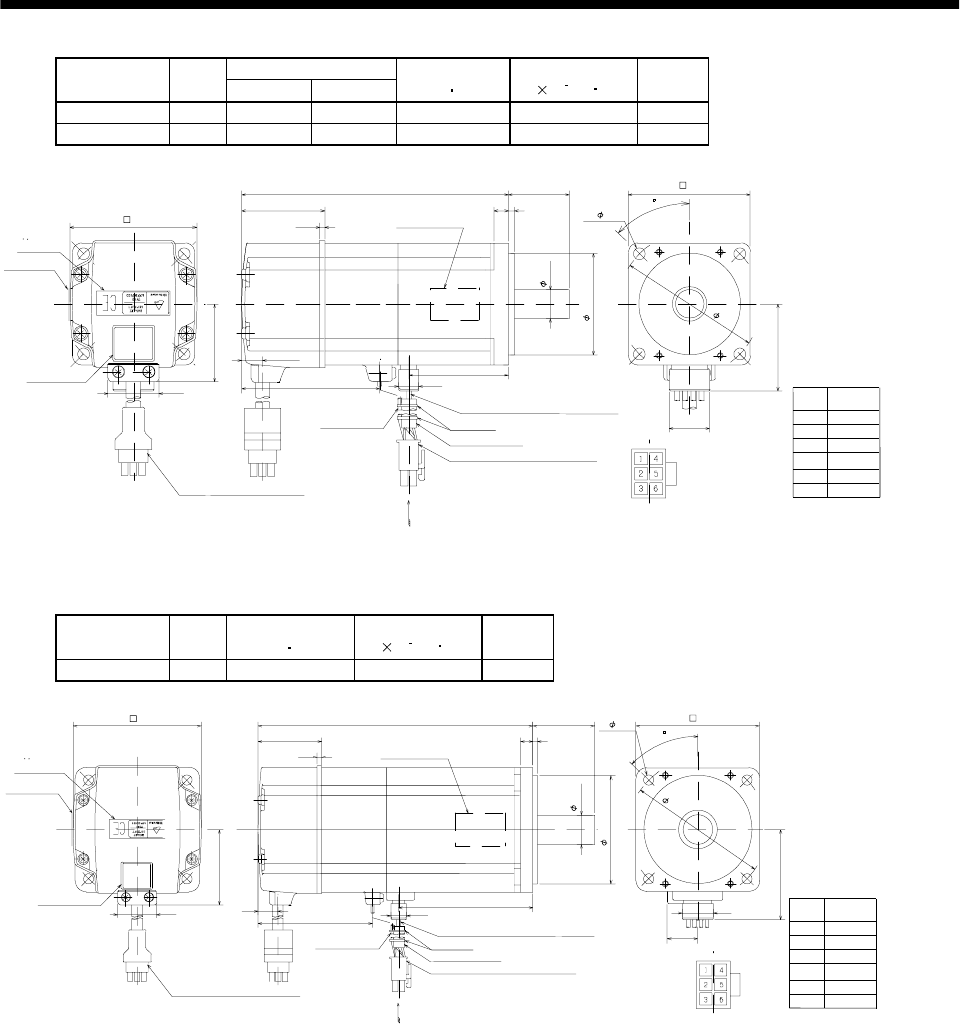
14. SERVO MOTOR
Variable Dimensions
Model
Output
[W]
LKL
Braking Force
[N
m]
Inertia Moment
J[
10
4
kg m
2
]
Weight
[kg]
HC-KFE23B 200 131.5 49.1 1.3 0.47 1.6
HC- KFE43B 400 156.5 72.1 1.3 0.72 2.1
(Note)[Unit: mm]
Note: The dimensions without tolerances are reference dimensions.
BC24194*
20
5557-06R-210 (Receptacle)
5556PBTL (Female terminal)
With connector 1-172169-9
(AMP)
Arrow A
42.8
Bottom
Top
Protective tube
Motor plate
(Opposite side)
50h7
70
60
14h6
Power supply connector (Molex)
Encoder cable 0.3m
Motor plate
Caution plate
Bottom
Top
KL
30
3
7
L
41
10.6
68
25.2
62
38.4
4- 5.8
Power supply lead 4-AWG19 0.3m
TUV plate
Arrow A
Top
Bottom
2.7
Top
Bottom
9.9
Insulock
Brake lead
2 - 0.3 0.3m
2
45
Power supply
connector pin
connection list
1
2
3
4
Pin No.
Application
Phase U
Phase V
Phase W
Earth
5
6
B1
B2
Model
Output
[W]
Braking Force
[N
m]
Inertia Moment
J[
10
4
kg m
2
]
Weight
[kg]
HC-KFE73B 750 2.4 1.635 4.0
(Note)[Unit: mm]
20
5557-06R-210 (Receptacle)
5556PBTL (Female terminal)
With connector 1-172169-9
(AMP)
Arrow A
58.1
Bottom
Top
Protective tube
Motor plate
(Opposite side)
70h7
90
60
19h6
Power supply connector (Molex)
Encoder cable 0.3m
Motor plate
Caution plate
Bottom
Top
3
8
40
39
11
72
25.2
82
48.7
4- 5.6
Power supply lead 4-AWG19 0.3m
TUV plate
Arrow A
Top
Bottom
2.7
Note: The dimensions without tolerances are reference dimensions.
BC24195*
Top
Bottom
177.5
19.5
Insulock
Brake lead
2 - 0.3 0.3m
2
45
Power supply
connector pin
connection list
1
2
3
4
Pin No. Application
Phase U
Phase V
Phase W
Earth
5
6
B1
B2
86.7