


















5 - 13
5. PARAMETERS
Class No. Symbol Name and function
Initial
value
Unit
Setting
range
Control
mode
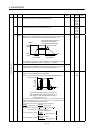
27 *ENR Encoder output pulses
Used to set the encoder pulses (A-phase or B-phase) output by the
servo amplifier.
Set the value 4 times greater than the A-phase or B-phase pulses.
You can use parameter No. 54 to choose the output pulse designation
or output division ratio setting.
The number of A/B-phase pulses actually output is 1/4 times greater
than the preset number of pulses.
The maximum output frequency is 1.3Mpps (after multiplication by
4). Use this parameter within this range.
For output pulse designation
Set " 0
" (initial value) in parameter No. 54.
Set the number of pulses per servo motor revolution.
Output pulse
set value [pulses/rev]
At the setting of 5600, for example, the actually output A/B-phase
pulses are as indicated below:
4
5600
A B-phase output pulses 1400[pulse]
For output division ratio setting
Set " 1
" in parameter No. 54.
The number of pulses per servo motor revolution is divided by the
set value.
Output pulse
[pulses/rev]
Resolution per servo motor revolution
Set value
At the setting of 8, for example, the actually output A/B-phase
pulses are as indicated below:
A B-phase output pulses 313[pulse]
8
10000
4
1
4000 pulse/
rev
1
to
65535
P S
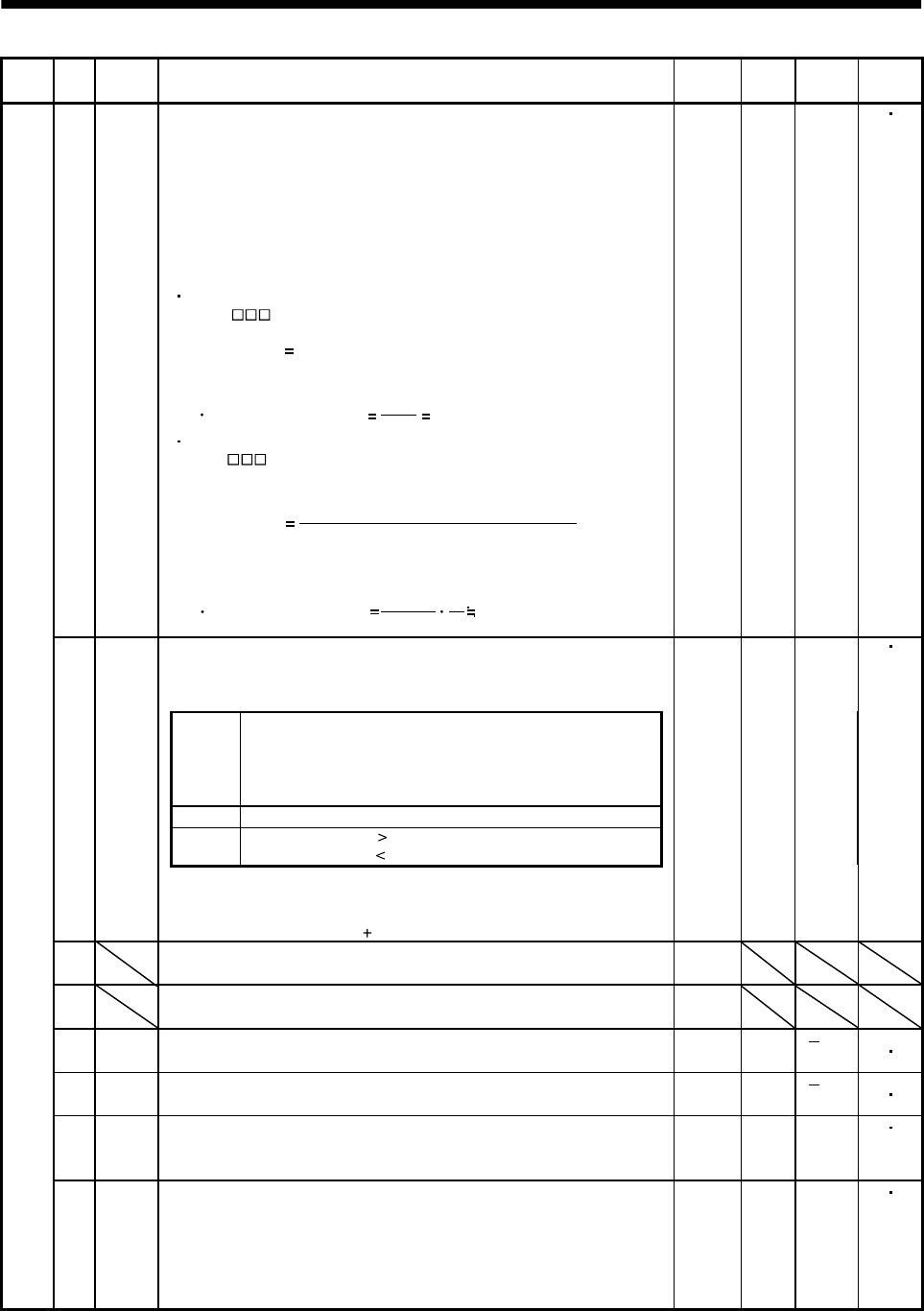
Internal torque limit 1
Set this parameter to limit servo motor torque on the assumption
that the maximum torque is 100[%].
When 0 is set, torque is not produced.
100 % 0
to
100
P S
(Note)
External
input
signals
TL1
Torque limit value made valid
0 Internal torque limit value 1 (parameter No. 28)
1 Parameter No. 76 Parameter No. 28: Parameter No. 28
Parameter No. 76
Parameter No. 28: Parameter No. 76
28 TL1
Note.0 :off
1 :on
When torque is output in analog monitor output, this set value is the
maximum output voltage (
8V). (Refer to Section 3.4.1, (5))
29 For manufacturer setting
Don’t change this value by any means.
0
30 For manufacturer setting
Don’t change this value by any means.
0
31 MO1 Analog monitor 1 offset
Used to set the offset voltage of the analog monitor 1 (MO1).
0
mV
999
to 999
P
S
32 MO2 Analog monitor 2 offset
Used to set the offset voltage of the analog monitor 2 (MO2).
0
mV
999
to 999
P
S
33 MBR Electromagnetic brake sequence output
Used to set the delay time (Tb) between electronic brake interlock
(MBR) and the base drive circuit is shut-off.
100 ms 0
to
1000
P S
Expansion parameters 1
34 GD2 Ratio of load inertia moment to servo motor inertia moment
Used to set the ratio of the load inertia moment to the servo motor
shaft inertia moment. When auto tuning mode 1 and interpolation
mode is selected, the result of auto tuning is automatically used.
(Refer to section 7.1.1)
In this case, it varies between 0 and 1000.
70 0.1
times
0
to
3000
P
S