















3 - 15
3. SIGNALS AND WIRING
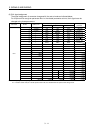
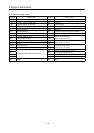
Control
mode
Signal Symbol
Connec-
tor pin
No.
Functions/Applications
I/O
division
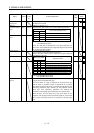
PS
Emergency stop EMG CN1-8 Disconnect EMG-SG to bring the servo motor to emergency stop
state, in which the servo is switched off and the dynamic brake is
operated.
Connect EMG-SG in the emergency stop state to reset that state.
DI-1
Clear CR CN1-5 Connect CR-SG to clear the position control counter droop pulses on
its leading edge. The pulse width should be 10ms or more.
When the parameter No.42 setting is "
1 ", the pulses are always
cleared while CR-SG are connected.
DI-1
Electronic gear
selection 1
CM1 When using CM1 and CM2, make them usable by the setting of
parameters No. 43 to 48.
The combination of CM1-SG and CM2-SG gives you a choice of four
different electronic gear numerators set in the parameters.
CM1 and CM2 cannot be used in the absolute position detection
system.
DI-1
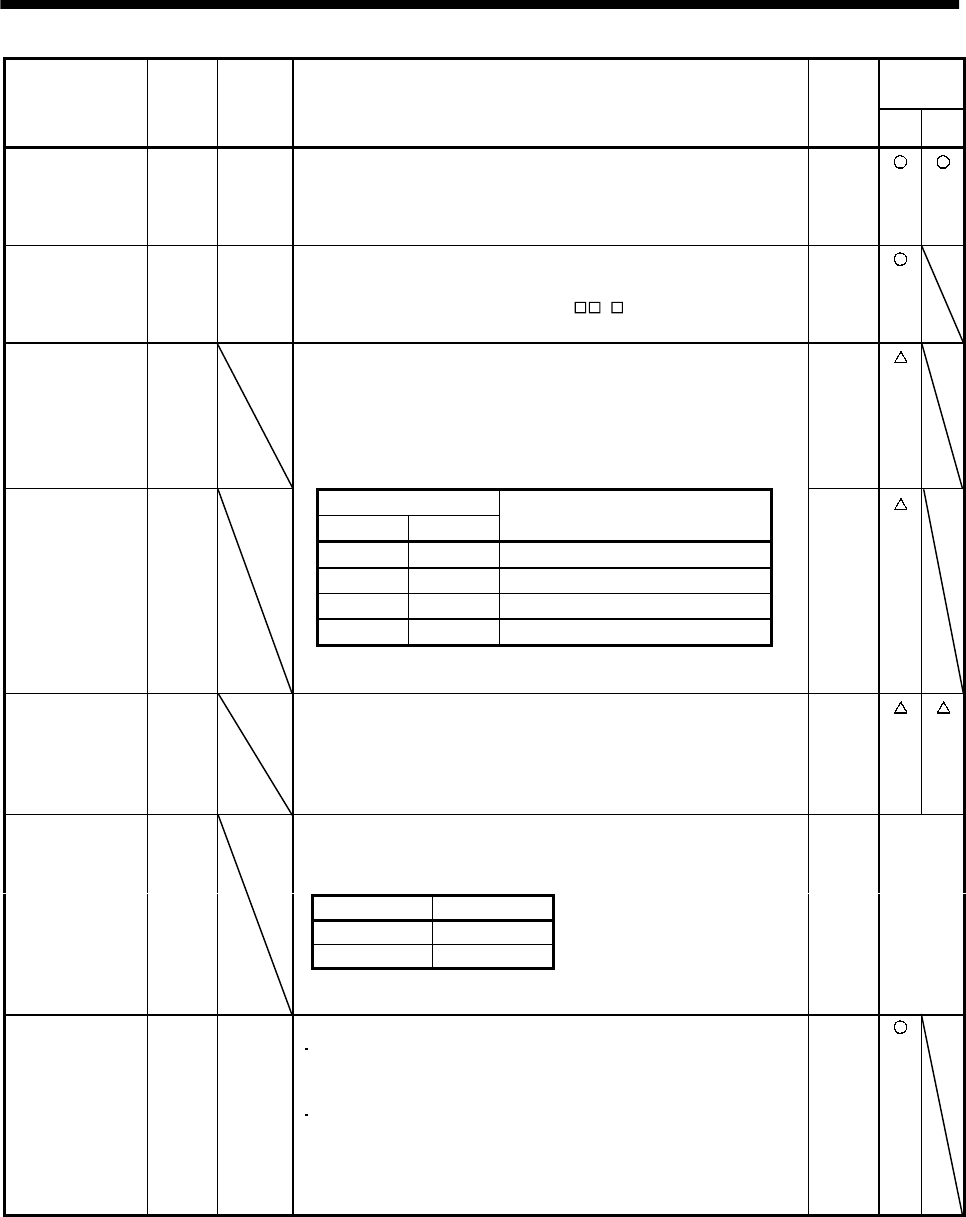
(Note) Input signals
CM2 CM1
Electronic gear namerator
00 Parameter No. 3
01 Parameter No. 69
10 Parameter No. 70
11 Parameter No. 71
Electronic gear
selection 2
CM2
Note.0: CM1/CM2-SG off (open)
1: CM1/CM2-SG on (short)
DI-1
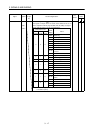
Gain changing CDP When using this signal, make it usable by the setting of parameter
No. 43 to 48.
Connect CDP-SG to change the load inertia moment ratio into the
parameter No. 61 setting and the gain values into the values
multiplied by the parameter No. 62 to 64 settings.
DI-1
Control change LOP <Position/internal speed control change mode>
Used to select the control mode in the position/internal speed
control change mode.
DI-1
(Note) LOP Control mode
0Position
1 Internal speed
Note.0: LOP-SG off (open)
1: LOP-SG on (short)
Refer to
Functions/
Appli-
cations.
Forward rotation
pulse train
Reverse rotation
pulse train
PP
NP
PG
NG
CN1-23
CN1-25
CN1-22
CN1-24
Used to enter a command pulse train.
In the open collector system (max. input frequency 200kpps):
Forward rotation pulse train across PP-SG
Reverse rotation pulse train across NP-SG
In the differential receiver system (max. input frequency 500kpps):
Forward rotation pulse train across PG-PP
Reverse rotation pulse train across NG-NP
The command pulse train form can be changed using
parameter No. 21.
DI-2