



















106
Parameter
Number
Name Setting Description
0.1 to 999s
Time required for the integral (I) action to provide the
same manipulated variable as that for the proportional
(P) action. As the integral time decreases, the set point
is reached earlier but hunting occurs more easily.
90
PID integral
time
- - - No integral control.
0 to 100%
Set the upper limit. If the feedback value exceeds the
setting, the FUP signal is output. (Process value of
4mA is equivalent to 0% and 20mA to 100%.)
91
PID upper
limit
- - - No function
0 to 100%
Set the lower limit. (If the feedback value falls below
the setting, the FDN signal is output. In this case, the
process value of 4mA is equivalent to 0% and 20mA to
100%.)
92
PID lower
limit
- - - No function
93
PID action
set point for
PU operation
0 to 100%
Valid only when Pr. 79 = "3" (n9 = 0 for computer link
operation) under the PU command in the PU operation
or PU/external combined mode. (When the computer
has the speed command write in the computer link
operation mode (NET))
For external operation, the voltage across 2-5 is the
set point.
(C3 value is equivalent to 0% and C4 value to 100%.)
0.01 to 10s
Time required for the differential (D) action to provide
the same process value as that for the proportional (P)
action. As the differential time increases, greater
response is made to a deviation change.
94
PID
differential
time
- - - No differential control.
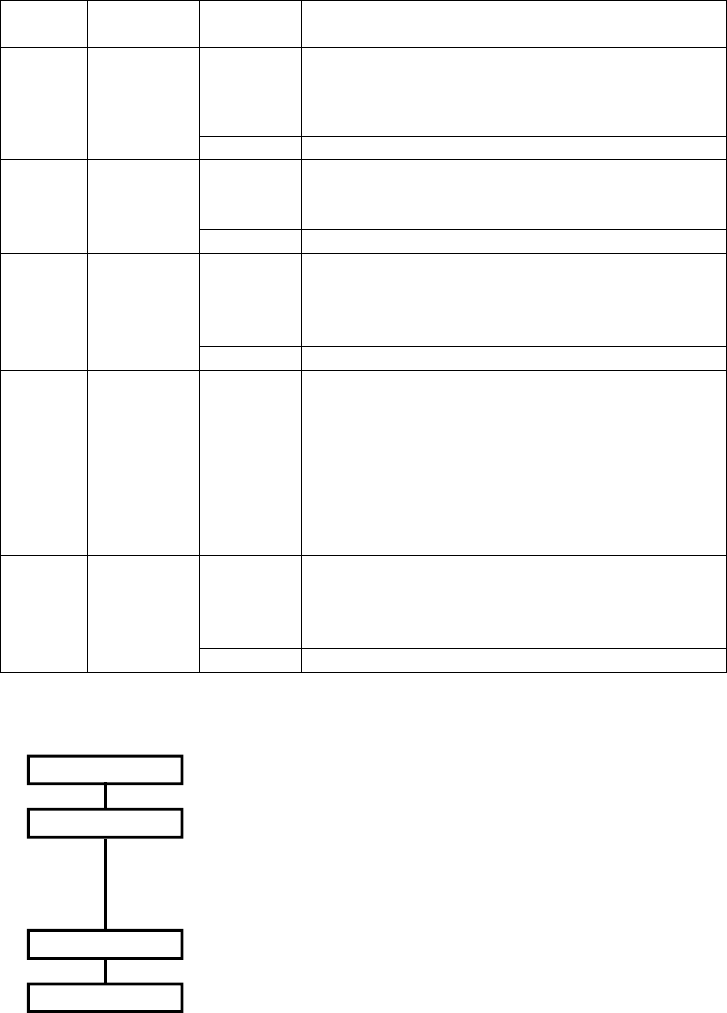
(6) Adjustment procedure
Turn on X14 signal.
Parameter setting
Terminal setting
Run
Adjust the PID control parameters, Pr. 88 to Pr. 94.
Set the I/O terminals for PID control.
(Use Pr. 64 and Pr. 65 (output terminal function selection) to set the
FUP and FDN signals.)
(Use any of Pr. 60 to Pr. 63 (input terminal function selection) to set
the X14 signal.)