



















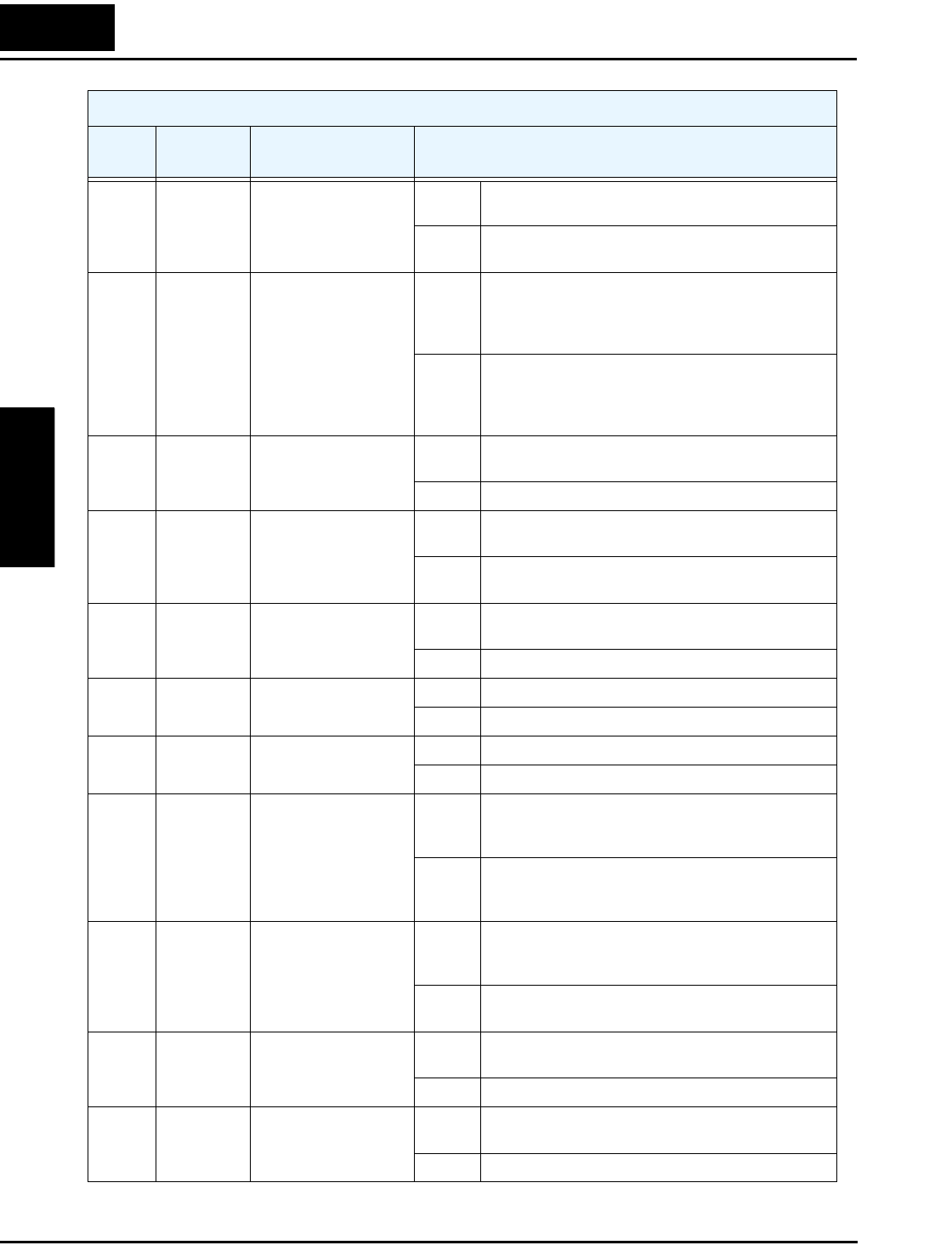
“C” Group: Intelligent Terminal Functions
Configuring Drive
Parameters
3–46
13 USP Unattended Start
Protection
ON ON powerup, the inverter will not resume a Run
command (mostly used in the US)
OFF ON powerup, the inverter will resume a RUN
command that was active before power loss
14 CS Commercial Power
Source
ON OFF-to-ON transition signals the inverter that the
motor is already running at powerup (via bypass),
thus suppressing the inverter’s motor output in Run
Mode
OFF ON-to-OFF transition signals the inverter to apply a
time delay (B003), frequency match its output to
existing motor speed, and resume normal Run Mode
operation
15 SFT Software Lock ON The keypad and remote programming devices are
prevented from changing parameters
OFF The parameters may be edited and stored
16 AT Analog Input Voltage/
current Select
ON Terminal [OI] is enabled for current input (uses
terminal [L] for signal return)
OFF Terminal [O] is enabled for voltage input (uses
terminal [L] for signal return)
18 RS Reset Inverter ON The trip condition is reset, the motor output is turned
OFF, and powerup reset is asserted
OFF Normal power-on operation
20 STA START
(3-wire interface)
ON Starts the motor rotation
OFF No change to present motor status
21 STP STOP
(3-wire interface)
ON Stops the motor rotation
OFF No change to present motor status
22 F/R FWD, REV
(3-wire interface)
ON Selects the direction of motor rotation: ON = FWD.
While the motor is rotating, a change of F/R will start
a deceleration, followed by a change in direction.
OFF Selects the direction of motor rotation: OFF =REV.
While the motor is rotating, a change of F/R will start
a deceleration, followed by a change in direction.
23 PID PID Disable ON Temporarily disables PID loop control. Inverter
output turns OFF as long as PID Enable is active
(A071=1).
OFF Has no effect on PID loop operation, which operates
normally if PID Enable is active (A071 = 1).
24 PIDC PID Reset ON Resets the PID loop controller. The main conse-
quence is that the integrator sum is forced to zero.
OFF No effect on PID loop controller
27 UP Remote Control
UP Function (motor-
ized speed pot.)
ON Accelerates (increases output frequency) motor from
current frequency
OFF No change to output frequency
Input Function Summary Table
Option
Code
Terminal
Symbol
Function Name Description