



















223
CHAPTER 4 FUNCTIONS
4
4.18 Self-tuning Function
4.18 Self-tuning Function
The Q64TCN constantly monitors the control state. When the control system is oscillatory, this function allows PID
constants to be automatically changed under the following situations such as:
• After the control has been just started
• When the set value (SV) is changed
• When the characteristics of a controlled object fluctuates
Unlike the auto tuning function, a normal control response waveform is monitored and PID constants are automatically
calculated and set. This allows an object to be controlled with the most suitable PID constants all the time without
disturbance.
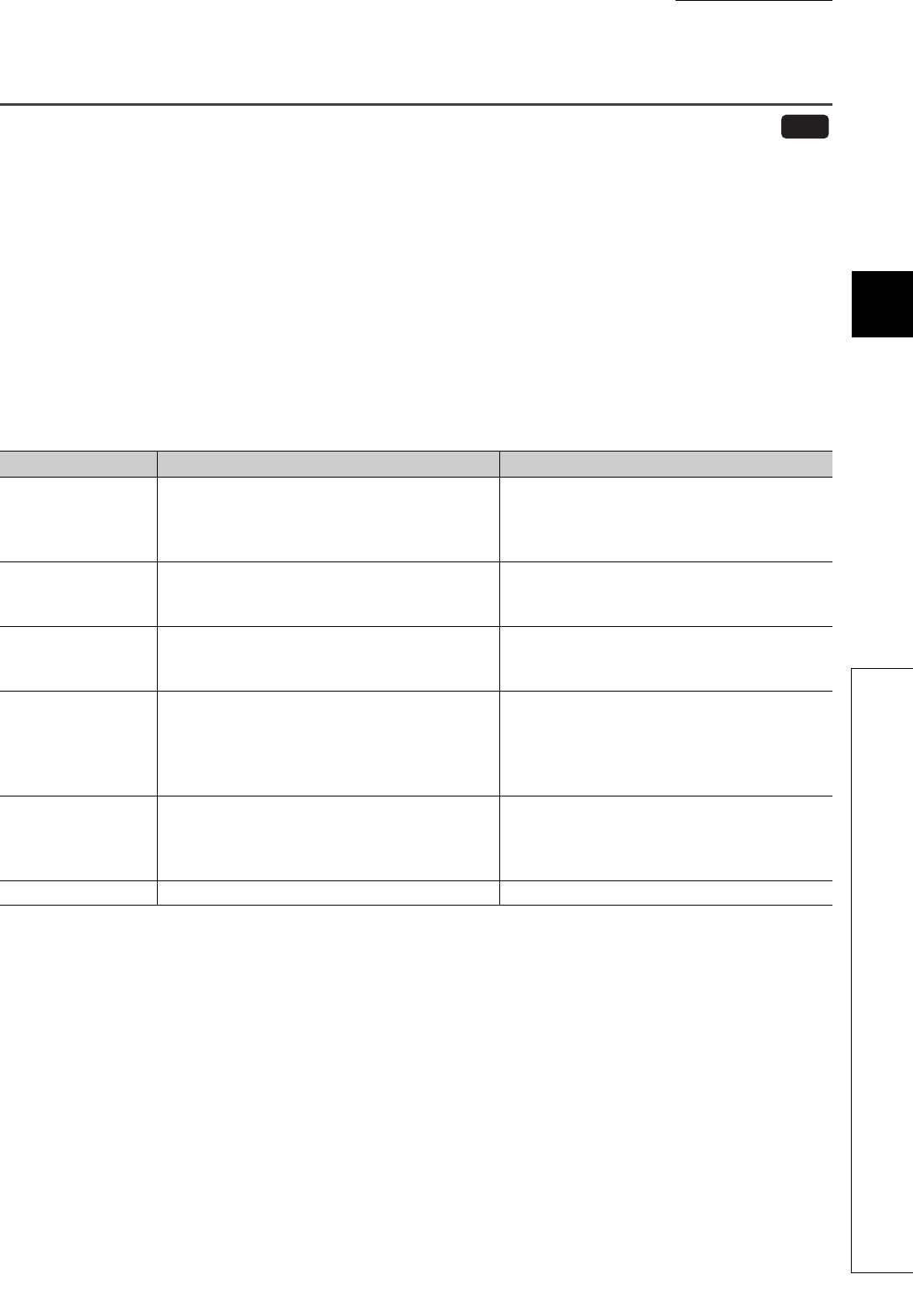
(1) Differences between auto tuning and self-tuning
The following table lists the differences between auto tuning and self-tuning.
Item Auto tuning Self-tuning
PID constants
calculation
The manipulated value (MV) is turned on/off and PID
constants are calculated based on the hunting cycle
and amplitude of the temperature process value (PV)
for the set value (SV).
PID constants are calculated based on an oscillation
occurred under situations such as after the control
has been just started, the set value (SV) has been
changed, and when a control response is oscillatory.
Execution method
Turning off and on CH Auto tuning instruction (Yn4 to
Yn7) starts auto tuning and changes PID constants
upon completion.
The Q64TCN constantly monitors the control
response. PID constants are calculated and changed
when the control response is slow.
Control response
PID constants are calculated based on the control
response of when the manipulated value (MV) is turned
on/off; therefore, the control may become unstable.
PID constants are calculated based on the control
response during temperature control; therefore, the
control is stable.
Calculation result
The optimum PID constants are calculated by one
tuning.
In the standard control, CH Loop disconnection
detection judgment time (Un\G59, Un\G91, Un\G123,
Un\G155) is also calculated.
The optimum PID constants may not be obtained by
one tuning. CH Loop disconnection detection
judgment time (Un\G59, Un\G91, Un\G123, Un\G155)
is not calculated.
PID constants setting
when the characteristics
of a controlled object
fluctuate
Users perform auto tuning again to change PID
constants.
The Q64TCN automatically changes PID constants.
Available control mode The standard control and heating-cooling control The standard control only
Standard