



















teamc part -build robot.dll -workarea 915 -release 9503
The output of this build would be both robot.dll and robot.map. Any parameters
specified in the teamc part -build robot.dll command would also apply to the build
of robot.map.
Synchronizing the build of unrelated parts
An entire application can require multiple separate builds. For example, in the robot
application, there might be one build to create the .dll parts, another to create the .exe
parts, and so on. To ensure that the entire application gets built together, you can
create a part that acts as a collector, with the .dll and .exe parts as input to it.
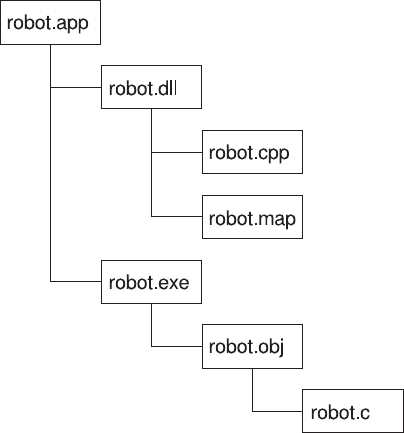
For example, Tim creates this build tree for the robot application:
Assuming he already has the build trees for robot.dll and robot.exe set up, here is how
he sets up the collector part:
1. He creates a null builder with no contents:
teamc builder -create nullBuilder -script null -none -environment os2
-condition == -value 0
2. He creates the collector part:
teamc part -create robot.app -builder nullBuilder -none -release 9503
-component robot
Figure 66. The build tree for robot.app
196 User’s Guide