



















AMD Geode™ SC1200/SC1201 Processor Data Book 123
SuperI/O Module
32579B
5.7.4 Acknowledge After Every Byte Rule
According to this rule, the master generates an acknowl-
edge clock pulse after each byte transfer, and the receiver
sends an acknowledge signal after every byte received.
There are two exceptions to this rule:
• When the master is the receiver, it must indicate to the
transmitter the end of data by not acknowledging (nega-
tive acknowledge) the last byte clocked out of the slave.
This negative acknowledge still includes the acknowl-
edge clock pulse (generated by the master), but the
ABD line is not pulled down.
• When the receiver is full, otherwise occupied, or a
problem has occurred, it sends a negative acknowledge
to indicate that it cannot accept additional data bytes.
5.7.5 Addressing Transfer Formats
Each device on the bus has a unique address. Before any
data is transmitted, the master transmits the address of the
slave being addressed. The slave device should send an
acknowledge signal on the ABD line, once it recognizes its
address.
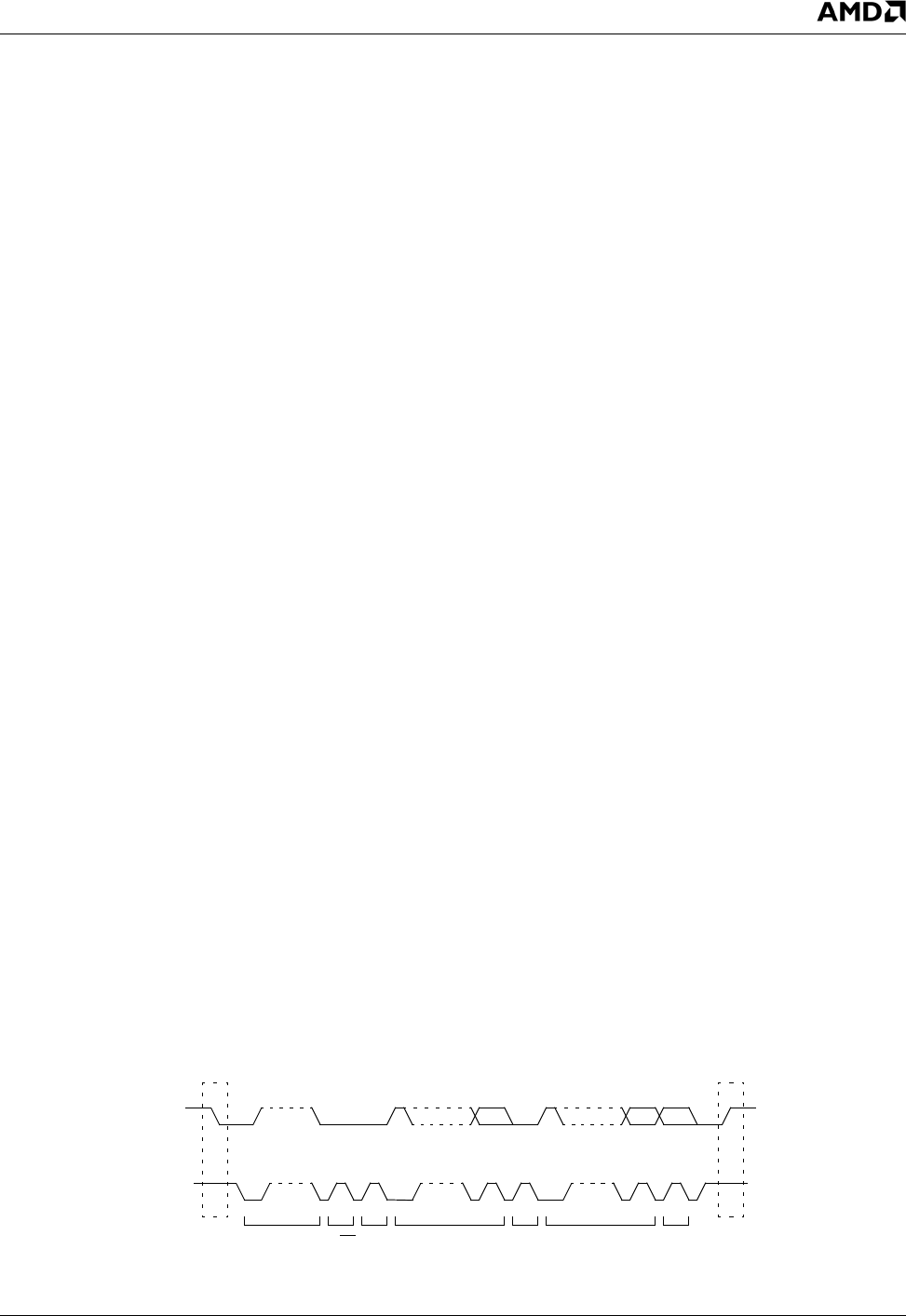
The address consists of the first 7 bits after a Start Condi-
tion. The direction of the data transfer (R/W#) depends on
the bit sent after the address, the eighth bit. A low-to-high
transition during a ABC high period indicates the Stop Con-
dition, and ends the transaction of ABD (see Figure 5-17).
When the address is sent, each device in the system com-
pares this address with its own. If there is a match, the
device considers itself addressed and sends an acknowl-
edge signal. Depending on the state of the R/W# bit (1 =
Read, 0 = Write), the device acts either as a transmitter or
a receiver.
The I
2
C bus protocol allows a general call address to be
sent to all slaves connected to the bus. The first byte sent
specifies the general call address (00h) and the second
byte specifies the meaning of the general call (for example,
write slave address by software only). Those slaves that
require data acknowledge the call, and become slave
receivers; other slaves ignore the call.
5.7.6 Arbitration on the Bus
Multiple master devices on the bus require arbitration
between their conflicting bus access demands. Control of
the bus is initially determined according to address bits and
clock cycle. If the masters are trying to address the same
slave, data comparisons determine the outcome of this
arbitration. In master mode, the device immediately aborts
a transaction if the value sampled on the ABD line differs
from the value driven by the device. (An exception to this
rule is ABD while receiving data. The lines may be driven
low by the slave without causing an abort.)
The ABC signal is monitored for clock synchronization and
to allow the slave to stall the bus. The actual clock period is
set by the master with the longest clock period, or by the
slave stall period. The clock high period is determined by
the master with the shortest clock high period.
When an abort occurs during the address transmission, a
master that identifies the conflict should give up the bus,
switch to slave mode and continue to sample ABD to check
if it is being addressed by the winning master on the bus.
5.7.7 Master Mode
Requesting Bus Mastership
An ACCESS.bus transaction starts with a master device
requesting bus mastership. It asserts a Start Condition, fol-
lowed by the address of the device it wants to access. If
this transaction is successfully completed, the software
may assume that the device has become the bus master.
For the device to become the bus master, the software
should perform the following steps:
1) Configure ACBCTL1[2] to the desired operation mode.
(Polling or Interrupt) and set the ACBCTL1[0]. This
causes the ACB to issue a Start Condition on the
ACCESS.bus when the ACCESS.bus becomes free
(ACBCST[1] is cleared, or other conditions that can
delay start). It then stalls the bus by holding ABC low.
2) If a bus conflict is detected (i.e., another device pulls
down the ABC signal), the ACBST[5] is set.
3) If there is no bus conflict, ACBST[1] and ACBST[6] are
set.
4) If the ACBCTL1[2] is set and either ACBST[5] or
ACBST[6] is set, an interrupt is issued.
Figure 5-17. A Complete ACCESS.bus Data Transaction
S
P
Start
Condition
Stop
Condition
ABD
ABC
1 - 7
8
9
1 - 7
8
9
1 - 7
8
9
Address
R/W
ACK
Data ACK
Data
ACK