










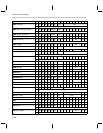






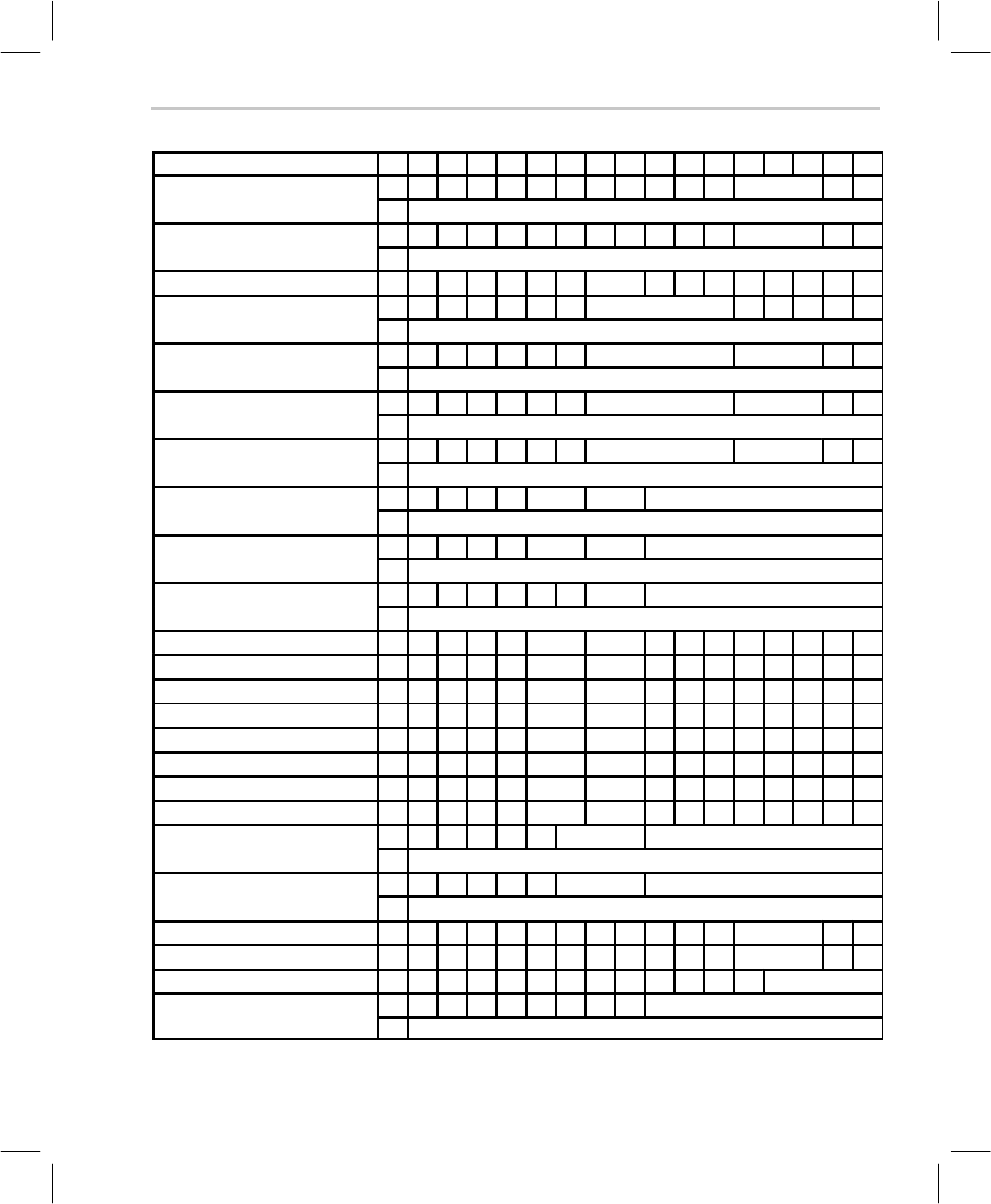
Instruction Set Encoding
4-191Assembly Language Instructions
Instructions 012345678910111213141516
JMP pma16, Rx––
1 0 0 0 0 0 0 1 0 1 0 1 Rx 1 0
x pma16
JMP pma16, Rx++R5
1 0 0 0 0 0 0 1 0 1 0 1 Rx 1 1
x pma16
JMP *An 1 0 0 0 1 0 0 An 0 0 0 0 0 0 0 0
Jcc pma16
1 0 0 0 0 0 Not cc 0 0 0 0 0
x pma16
Jcc pma16, Rx++
1 0 0 0 0 0 Not cc Rx 0 1
x pma16
Jcc pma16, Rx––
1 0 0 0 0 0 Not cc Rx 1 0
x pma16
Jcc pma16, Rx++R5
1 0 0 0 0 0 Not cc Rx 1 1
x pma16
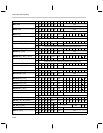
MOV {adrs}, An[~] [, next A]
0 0 1 1 A~ next A An adrs
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
MOV An[~], {adrs} [, next A]
0 0 1 0 A~ next A An adrs
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
MOV {adrs}, *An
0 1 0 1 1 1 0 An adrs
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
MOV An[~], imm16 [, next A] 1 1 1 0 0 next A An 0 0 1 0 0 1 0 ~A
MOV MR, imm16 [, next A] 1 1 1 0 0 next A An 1 1 1 0 0 1 0 0
MOV An, An~ [, next A] 1 1 1 0 0 next A An 0 0 1 1 1 0 A~ ~A
MOV An[~], PH [, next A] 1 1 1 0 0 next A An 0 1 1 1 0 0 A~ ~A
MOV SV, An[~] [, next A] 1 1 1 0 0 next A An 1 0 1 0 0 0 A~ 0
MOV PH, An[~] [, next A] 1 1 1 0 0 next A An 1 0 1 0 1 0 A~ 0
MOV An[~], *An[~] [, next A] 1 1 1 0 0 next A An 0 0 0 1 0 0 A~ ~A
MOV MR, An[~] [, next A] 1 1 1 0 0 next A An 1 0 1 1 0 0 A~ 0
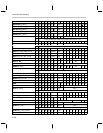
MOV {adrs}, Rx
1 1 1 1 0 0 Rx {adrs}
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
MOV Rx, {adrs}
1 1 1 1 0 1 Rx {adrs}
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
MOV Rx, imm16 1 1 1 1 1 1 1 0 0 0 1 0 Rx 0 0
MOV Rx, R5 1 1 1 1 1 1 1 0 0 1 1 0 Rx 0 0
MOV SV, imm4 1 1 1 1 1 1 0 1 0 0 0 0 0 imm4
MOV SV, {adrs}
†
1 1 0 1 1 0 0 0 0 adrs
x dma16 (for direct) or offset16 (long relative) [see section 4.13]
†
Signed multiplier mode resets UM (bit 1 in status register ) to 0