



















Revision January 2009 6-1
Chapter 6 Control Modes of Operation
6.1 Control Modes of Operation
The Delta ASDA-AB series can be programmed to provide six single and five dual modes of operation. Their
operation and description is listed in the following table.
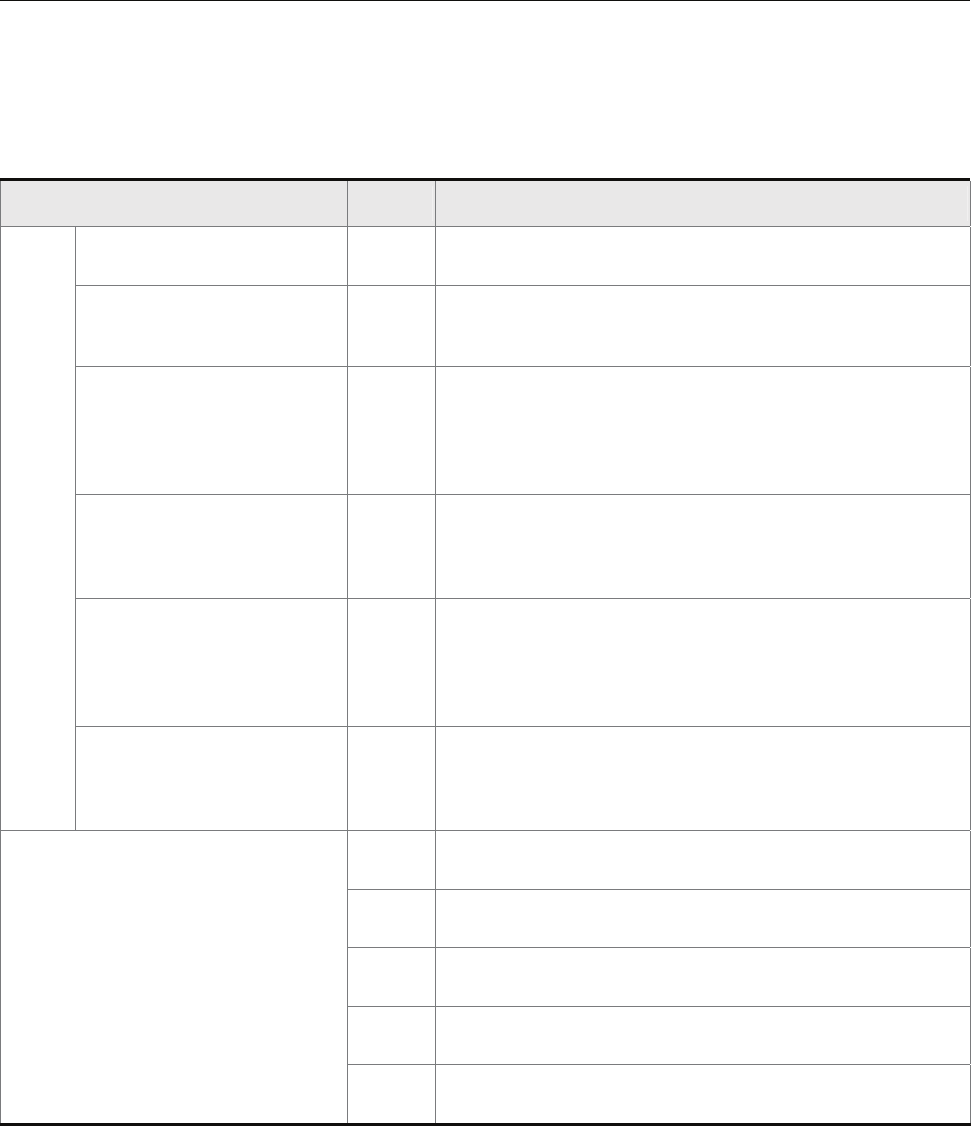
Mode Code Description
External Position Control Pt
Position control for the servo motor is achieved via an
external pulse command.
Internal Position Control Pr
Position control for the servo motor is achieved via by 8
commands stored within the servo controller. Execution of
the 8 positions is via Digital Input (DI) signals.
Speed Control S
Speed control for the servo motor can be achieved via
parameters set within the controller or from an external
analog -10 ~ +10 VDC command. Control of the internal
speed parameters is via the Digital Inputs (DI). (A maximum
of three speeds can be stored internally).
Internal Speed Control Sz
Speed control for the servo motor is only achieved via
parameters set within the controller. Control of the internal
speed parameters is via the Digital Inputs (DI). (A maximum
of three speeds can be stored internally).
Torque Control T
Torque control for the servo motor can be achieved via
parameters set within the controller or from an external
analog -10 ~ +10 VDC command. Control of the internal
torque parameters is via the Digital Inputs (DI). (A
maximum of three torque levels can be stored internally).
Single
Mode
Internal Torque Control
Tz Torque control for the servo motor is only achieved via
parameters set within the controller. Control of the internal
torque parameters is via the Digital Inputs (DI). (A
maximum of three torque levels can be stored internally).
Pt-S Either Pt or S control mode can be selected via the Digital
Inputs (DI)
Pt-T Either Pt or T control mode can be selected via the Digital
Inputs (DI)
Pr-S Either Pr or S control mode can be selected via the Digital
Inputs (DI)
Pr-T Either Pr or T control mode can be selected via the Digital
Inputs (DI)
Dual Mode
S-T Either S or T control mode can be selected via the Digital
Inputs (DI)
The steps of changing mode:
(1) Switching the servo drive to Servo Off status. Turning SON signal of Digit input to be off can complete
this action.
(2) Using parameter P1-01. (Refer to chapter 7).
(3) After the setting is completed, cut the power off and restart the drive again.