



















Chapter 7 Servo Parameters|ASDA-AB Series
Revision January 2009 7-89
Table 7.A Input Function Definition
Sign
Setting
Value
Digital Input Function Description
SON 01 Servo On. Switch servo to "Servo Ready". Check parameter P2-51.
ARST 02 Alarm Reset. A number of Faults (Alarms) can be cleared by activating ARST.
GAINUP 03
Gain switching in speed and position mode. When GAINUP is activated (P2-27 is set
to 1), the gain is switched to the gain multiplied by fluctuation
CCLR 04
Pulse clear (see P2-50). When CCLR is activated, the parameter P2-50 Pulse
Deviation Clear Mode is executed.
0: Clear position pulse deviation number (available in Pt and Pr mode only)
1: Clear motor feedback pulse and rotation number (available in Pt and Pr mode only)
2: Clear remaining position pulses and interrupt the motor operation (available Pr
mode only).
3: Clear remaining position pulses and interrupt the motor operation. After the motor is
stopped, activate TPOS signal (available Pr mode only).
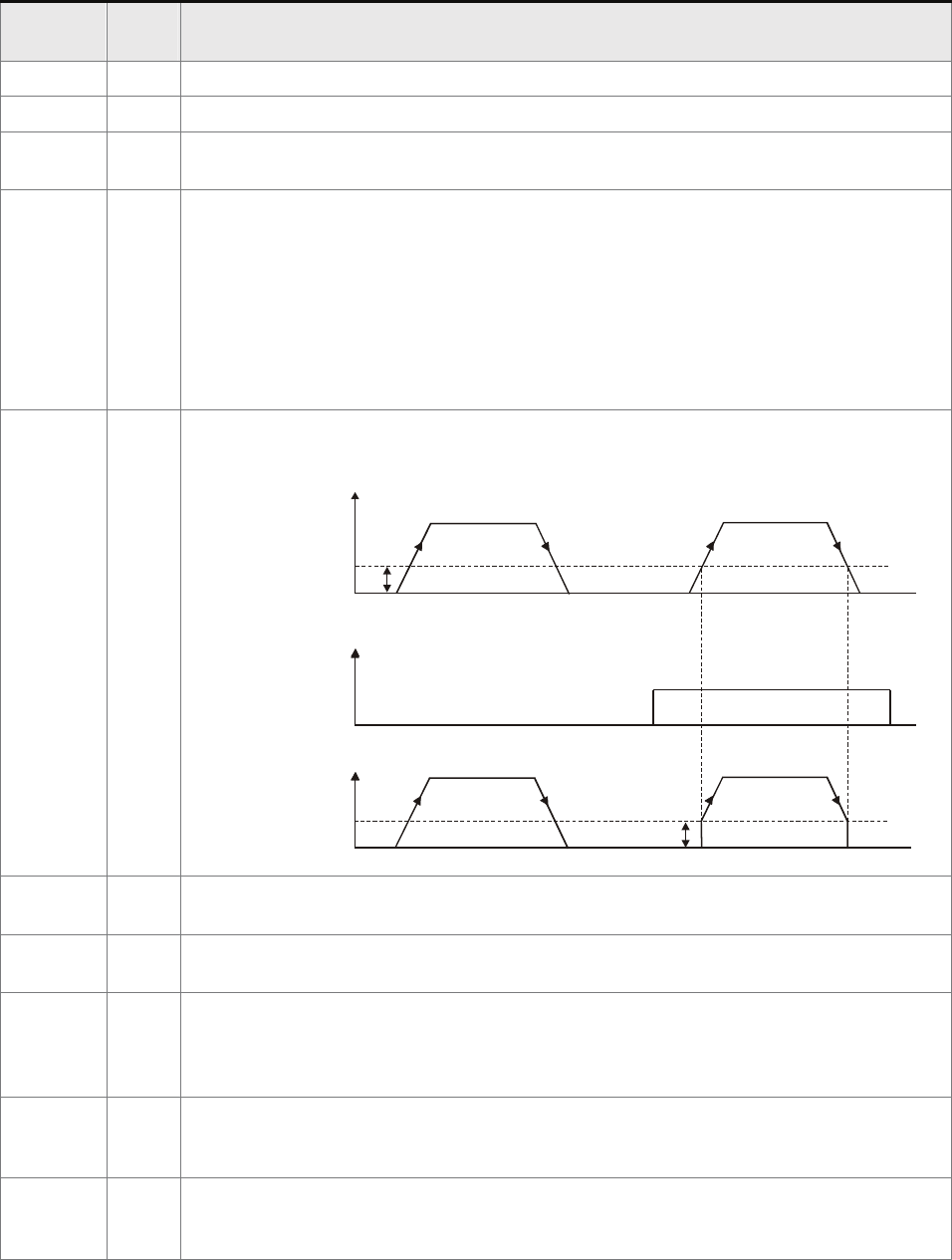
ZCLAMP 05
Zero speed CLAMP. When this signal is On and the motor speed value is below the
setting value of P1-38, it is used to lock the motor in the instant position while ZCLAMP
is On.
Time
Setting value of
P1-38 (Zero speed)
OFF
ZCLAMP
input signal
Motor Speed
ON
Speed
Command
Setting value of
P1-38 (Zero speed)
CMDINV 06
Command input reverse control. When the drive is in Pr, Speed and Torque mode, and
CMDINV is activated, the motor is in reverse rotation.
HOLD 07
Position command pause (Internal position control only). When the drive is in Pr mode
and HOLD is activated, the motor will pause.
CTRG 08
Command triggered (available in Pr mode only). When the drive is in Pr mode and
CTRG is activated, the drive will command the motor to move the stored position
which correspond the POS 0, POS 1, POS 2 settings. Activation is triggered on the
rising edge of the pulse.
TRQLM 09
Torque limit enabled. When the drive is in speed and position mode, and TRQLM is
activated, it indicates the torque limit command is valid. The torque limit command
source is internal parameter or analog voltage.
SPDLM 10
Speed limit enabled. When the drive is in torque mode and TRQLM is activated, it
indicates the speed limit command is valid. The speed limit command source is
internal parameter or analog voltage.